Social Interaction
Video-Based Studies of Human Sociality
Provoking Situations?
Why Reenact "Student-Robot" Interaction, in L.A. or Anywhere
Philippe Sormani1,2 & Audrey Hostettler1
1University of Lausanne
2CEMS-EHESS, Paris
Abstract
This paper presents a practice-based video analysis of student-robot interaction in situ. In so doing, the paper explicates the double interest of provoking situations, both as a praxeological topic and pedagogical resource. Designed and developed as a hybrid study of instructional work, the paper combines video analysis and the practical reenactment of two contrasting episodes of student-robot interaction. This combined approach pursues two related aims. First, the paper explicates (some of) the "tutorial problems" (Garfinkel, 2002, chapter 4) resulting from the practical reenactment, problems that recast and complement the video analysis. In particular, the focal theme of situated agency> in student-robot interaction will be revisited as an intricate phenomenon and pedagogical issue. Second, the paper offers a reflexive intervention in ethnomethodology/conversation analysis (EM/CA), insofar as it prospects a (relatively) new avenue for EM/CA research, both from within and contributing to its productive tensions. That is, the paper articulates the video reenactment of situated interaction as a heuristic strategy, while leveraging the (arguably) phenomenological difference between EM and CA on education as a methodological resource. The paper concludes with how and why the provocative impetus of science and technology studies (Woolgar, 2004) can, and perhaps should, be leveraged for prospective EM/CA studies more broadly, be it on their historically alluring home turf, Los Angeles, or anywhere else.
Keywords: student-robot interaction, video reenactment, ethnomethodology
1. Introduction: Practical Reenactment, From Neglected Heuristics to Hybrid Study
Recently, a colleague reminded us of the contrast between the current abundance of reenactment methodologies in the social and human sciences at large and their quasi-absence in the contemporary field of Ethnomethodology/Conversation Analysis (EM/CA), the field diversely concerned with the "methods persons use in doing social life" (Sacks, 1984: 21). In current social sciences, hardly any discipline, field or subfield lacks "reconstruction, replication [and/or] reenactment" (Dupré et al., 2020). Not only do innumerable studies tackle (re)enactment as a topic that presents itself in the technical specifics of past experimentation or the cultural particulars of performance art (Goldberg, 2011), but they also leverage it as a resource of methodological interest. Far from being confined to one discipline or another, "reenactment as a research strategy" (Sormani, 2019) now spans archeology, architecture, and cultural anthropology, as well as the history of science and technology, art history, (digital) media, film and performance studies—to name the more prominent fields in the social and human sciences. Is this to say that practical reenactment has been neglected as a heuristic strategy in EM/CA research?1
Undoubtedly, Garfinkel's EM, especially in its later program statements and programmatic studies, required the analyst to (re)enact social phenomena under scrutiny to probe their constitutive technicity (e.g., Garfinkel, 2002). Yet CA, as a specialized development of EM, has refined its own technical transcriptions to analyze the multifaceted character of embodied interaction (e.g., Goodwin, 2000; Heath & Hindmarsh, 2002; Mondada, 2018), rather than to deliberately engage in its situated performance as reflexive heuristics. The remainder of this introduction briefly revisits this paradoxical situation of EM/CA inquiry and, on that basis, positions the ensuing hybrid study of instructional work and its thematic interests in student-robot interaction.2
On the one hand, EM has been concerned with practical methods for "making the experiment work" (Garfinkel, 2022: 31; emphasis in original) in the natural sciences, and existing historiographic rationales (e.g., Fors et al., 2016) come close to EM's own research interest for reengaging in experimental practice (e.g., Bjelić, 1996; Sormani, 2014). Consider Garfinkel's rationale for attempting to (re)enact Galileo's "inclined plane demonstration" in this respect:
The experiment on which we report was set up, not to figure out how Galileo's experiment did work but rather to discover what would make it not work, what contingencies would lose the phenomena. Because these would then be contingencies that Galileo would have to have taken into account. And indeed when you find out what they are, you can see that certain features of the design of his experiment are designed to take those contingencies into account (Garfinkel, 2002: 264, note 2).
Experimental sciences and their critical contingencies, however, do not exhaust the situated practices of self-instructive interest to EM researchers. Any practice lends itself to being tentatively enacted or reenacted, be it jazz improvisation (Sudnow, 1978), mathematical demonstration (Livingston, 1986) or basketball (Macbeth, 2022)—to name but a few canonical EM studies in this vein. Drawing on the deliberate adoption of a (novice) practitioner's stance, the quoted studies had each of its authors explicate "what experts […] 'assume' and 'take for granted' as the most ordinary […] features of their work practices" (Livingston, 2008:132). At the same time, the quoted studies challenge(d) conventional sociology for missing out on the constitutive particulars of each distinctive practice. These two moves anticipate (at least part of) the current social science trend for reenactment methodologies. Taken together, they leverage the practical engagement of scholars (e.g., tinkering with artifacts) to challenge the material obliviousness of their discursive disciplines (e.g., history of ideas) and to recover the "lived details" (Garfinkel, 2002: 67) of the practices studied in situ.3
On the other hand, and despite the recurring allusion to its EM background, CA rarely requires its analysts to perform the phenomena they analyze—that is, to explicitly engage in reenactment as a methodological requirement, rather than to study reenactment as simply another interesting topic (e.g., Tutt & Hindmarsh, 2011). The same holds for the video analysis of situated interaction more extensively, also known as multimodal CA (Deppermann, 2013) or the video-based analysis of verbal and embodied, materially embedded, and/or instrumentally equipped interaction (Streeck et al., 2010), including the various practical uses of video, lay and professional, as its derivative topic (Broth et al., 2014). In sum, video analysis proceeds by technical extrapolation from CA routine methodology, rather than by practical reenactment (from the "standpoint of the performer," Sudnow, 1978: xiii). This extrapolative move sometimes finds an ironic expression when one's own research practice is topicalized through video analysis. For example, this journal recently published a special issue on "Researchers' participation roles in video-based fieldwork" (Katila et al., 2021). However, the special issue contributions by and large rely on CA routine methodology (live recording, episode selection, interaction transcription, sequential analysis, etc.) to define and describe the analyst's participation roles as its target topic, thus begging the question of how a skilled practice, as observed and/or participated in, lent itself to the administered methodology as a "wild phenomenon" in the first place (e.g., amateur basketball "on the fly," Macbeth, 2022).4
Designed and developed as a hybrid study of instructional work, this paper combines video analysis and the practical reenactment of two contrasting episodes of student-robot interaction. In dialogue with the outlined situation of EM/CA inquiry, this combined approach pursues two related aims. First, the paper explicates (some of) the "tutorial problems" (Garfinkel, 2002, chapter 4) resulting from the practical reenactment, problems that recast and complement the video analysis. In particular, the focal theme of situated agency in "student-robot" interaction will be revisited as an intricate phenomenon and pedagogical issue. Second, the paper offers a reflexive intervention in EM/CA, insofar as it prospects a (relatively) new avenue for EM/CA research, both from within and contributing to its productive tensions. That is, the paper articulates video reenactment of situated interaction as a heuristic strategy, while leveraging the (arguably) phenomenological difference between EM and CA on education as a methodological resource. The paper concludes with how and why the provocative impetus of science and technology studies (Woolgar, 2004) can, and perhaps should, be leveraged for prospective EM/CA studies more broadly, be it on their historically alluring home turf, Los Angeles (L.A.), or anywhere else.5
2. Educational Practices in Situ: EM/CA's Phenomenological Difference
"[…] the world is wild with pairs"
(Garfinkel, 2021:33).
Why set out with educational practices, their situated availability, and a phenomenological difference in this respect, an arguable difference between EM and CA? Certainly, CA has taken inspiration from EM, as it continues to home in on the "methods people use to understand each other while talking" (Wieder, 1978:374, n. 2). Yet as both fields have developed, and indeed specialized, they have also grown apart, regarding not only their respective (ethno-)methodologies but also their core phenomena (as this section further elaborates). Educational practices, in this respect, remain of particular interest. For CA, they have become the empirical focus of innumerable studies that analyze classroom interaction, among many other kinds of interaction (e.g., ten Have, 2001), while applying CA's core principles and routine methodology. For EM, the social world at large is made up of myriad settings of instructed action, not solely particular sites conventionally identifiable in educational terms (e.g., "school" or "university"). Once engaged in, worldly courses of instructed action already variably instruct, if not educate, their participants in their course—that is, in and on the action's very course, regarding another task or topic, in passing or deliberately so (e.g., regarding the local implications of a given instruction). In short, "instructed action […] is not a provincial concept" (Macbeth, 2014:307, n. 7). Taken together, Garfinkel's notions of "instructed action" and its "praxeological validity" allude to the pervasively instructive character of social practices (e.g., 2002:105–109). So does his epigraph above.6
The phenomenological difference between EM and CA can be specified with respect to the "situated availability" of educational practices, setting out with the manifest contrast between their respective core phenomena: turn organization in classroom interaction (CA) versus worldly success of instructed action (EM). Against the background of their joint literature (e.g., Hester & Francis, 2000; Smith, 2021), this difference marks both a complementary interest and an open question (Macbeth, 2014:303–304). The complementary interest is in the orderly features of classroom interaction, setting out with initiation-response-evaluation (IRE) turns at talk as its routine order of interaction (Mehan 1979; Macbeth, 2003), on the one hand, and the recognizable production of instructed action(s) as a ubiquitous yet each time distinctively methodical accomplishment, on the other (Garfinkel, 2002, chap. 6; Lynch & Lindwall, in press). The open question, if not "central puzzle," is "how instructed action then becomes a [turn] sequence" (Macbeth, 2014:303) and, we should add, how a turn sequence (e.g., an IRE classroom routine) may become or serve an instructed action (e.g., the correctly calculated solution to a basic math problem). In examining student-robot interaction in situ, the remainder of this paper will address this twofold question, both empirically (i.e., regarding the interaction/instruction nexus) and programmatically (i.e., regarding the EM/CA relationship).7
In so doing, the paper revisits the focal theme of situated agency in student-robot interaction, while offering a reflexive intervention in EM/CA more broadly. As a hybrid study of instructional work, the paper revisits situated agency in student-robot interaction as an intricate phenomenon (e.g., Pelikan et al., 2022) and pedagogical issue (e.g., Mäkitalo, 2016). That is to say, the paper not only describes how students engage in practical tasks of educational robotics, the field studied in this paper (see Section 3), but also spells out what can be learned from our practical video reenactment of student engagement (i.e., how their situated agency offers new teaching opportunities). As a reflexive intervention, the paper probes "formal structures of practical action" (cf. Button et al., 2022) as they happen to be displayed by two contrasting episodes of student-robot interaction (and can be partly explicated via CA methodology), before interrogating the contrasting display in the light of tutorial problems (as encountered when reenacting said episodes from a performative EM stance). Practice-based video analysis, then, serves a hybrid study of instructional work, more so than a conceptual clarification of its epistemological status (see Lynch, 2022).8
3. Reenacting Student-Robot Interaction, Provoking Instructive Situations
Educational robotics (ER) is usefully defined as a "discipline designed to introduce students to robotics and programming interactively from a very early age" (Iberdrola, 2023: 1; see also Miserli & Komis, 2014). Depending on pedagogical priorities, ER invites students to build robots (i.e., prioritizing mechanical understanding of robotics principles) or to program robots (i.e., prioritizing computer programming via an already assembled robot). Drawing on video recordings of student-robot interaction in situ, this core section of the paper examines two ER exercises of the latter kind: in both cases, students were asked to engage with robot programming. In the first case (a discovery scenario), they were asked to observe, discover, and describe the "autonomous behavior" of a pre-programmed robot. In the second case (a program scenario), the task was to program, test, and, if necessary, reprogram the same robot—an adult palm-sized, two-wheeled mobile robot, with differential drive, named Thymio (see Fig. 1) and which, for methodological consistency, we have nicknamed Ed in what follows (see Note 9 below). How would students interact and go about their respective tasks (i.e., displaying situated agency)? What more, else, or different can be learned from reenacting the task's achievement (i.e., regarding its pedagogical interest)? A practice-based video analysis will be offered in answer to these questions—that is, a video analysis which, in addition to its transcript-mediated character, draws upon the practical reenactment of the analyzed interaction (e.g., Sormani, 2016, 2019).9
Figure 1. Lateral view of "Thymio," two-wheeled educational mobot (image credit: Mobsya Media Kit, https://media.mobsya.org/)

3.1 Discovery scenario: [task formulation/protocol subversion]
In ER, the discovery scenario designates the first exercise in a series designed to have students develop basic programming skills. This first exercise is meant to have students (aged 5–6) discover the robot by describing its moves, its autonomous behavior, which is made possible via a "feedback control system" (Ben-Ari & Mondada, 2018:96–97). From observing and describing the robot's moves, students are asked to infer how it has been programmed for its control system to operate and to operate in a particular way. For the purpose, the instructor would describe the task, provide the students with the means to achieve it (e.g., the mobile robot Ed, a form to be filled out, a set of wooden cubes), and eventually evaluate their achievement on that basis. IRE sequences were used to administer this classroom routine, including the recurring assessment of whether single groups of students were "on task" or "off task" (Greiffenhagen, 2012).10
In particular, the instructor's contrast allows us to identify a first "off task" episode, as students had (in one student's words) engaged in "protocol subversion" with respect to the initially formulated task. Part of a series of exercises, the discovery scenario itself, when put into practice as a pedagogical exercise, exhibited a serial structure of successive tasks. That is to say, in describing tasks successively, the instructor took into account student work up to any given point, the relative success of the students, and other particulars, while projecting forthcoming tasks and anticipating pending contingencies (e.g., time remaining). Each task was formulated as the manifest part of an evolving ensemble. In turn, the pedagogical exercise could be called into question on that very basis. [Task formulation] and [protocol subversion] can be contrasted accordingly (see Excerpts 1 and 2).
Excerpt 1. Final request for precise description of robot behavior ([Task formulation])
Open in a separate window
Excerpt 2. Playful "off task" exploration of robot behavior ([Protocol subversion])
Open in a separate windowHalfway through the discovery scenario, the instructor (INS) formulates the final task of the pedagogical exercise as consisting of the precise description of robot behavior (Excerpt 1). At the same time, she explains to the class of students (SSs) that the robot Ed will not only display its behavior in different colors, but also that the display corresponds to various modes of robot behavior (lines 618–621). However, the class seems somewhat reluctant to engage in the task (line 627). Instead, one pair of students, Carlo (CAR) and André (AND), engages in playful "off task" exploration of robot behavior (Excerpt 2). First, they attempt to block the advancing robot by placing wood blocks in its way, rather than using the form provided to facilitate the color coding of robot behavior (the form remains untouched on the desktop, as shown in upper right corner of Excerpt 2, #3, #4). Second, and subsequently to Ed's escape (Excerpt 2, 656–659, #4), Carlo starts parading a red wood block (shown in lower right corner, #4) in front of the robot, which, as a result, starts turning on its own axis, whilst increasing its motor noise ("jiii. jiii. jiii") and triggering André's mocking laughter ("he, he, he."). Eventually, Carlo and André manage to trap robot Ed, as Carlo positions the red wood block as a "last brick" in the ring wall of wood cubes that André has been building around Ed, before showing and mockingly explaining their playful achievement to the camera: "Voilà, leave it like that" (Excerpt 3, 674–684, #8), "(he/it) is blocked,=he." (Excerpt 3, 689).
Excerpt 3. Playful "off task" incapacitation of robot behavior ([Protocol subversion])
Open in a separate windowHow can Carlo and André's playful exploration of robot behavior be seen as subverting the pedagogical exercise they were expected to participate in? Their [protocol subversion] and its negative connotation (as intimated by this very term, used by the instructor) become visible as they are playing "off task," since their play challenges the very game, or exercise, they were expected to participate in. The exercise requires them to observe, discover, and describe the observable moves of a pre-programmed robot. Yet Carlo and André's play challenges the exercise's assumption of "autonomous [robot] behavior" (i.e., as manifested by discrete color modes, see Excerpt 1, 617–621).
In this respect, also consider Carlo's answer to the reproaching question of the instructor: "But what does it do there!?" (asked subsequently to Excerpt 2). While continuing his parading of the red wood block in front of Ed, Carlo cheekily answers "I don't know, me." In turn, André's punchline—"[] plays the idiot, he's at school!"—accentuates the disjunction by casting Ed's circular motion in terms of the instructor's agency assumption, despite Carlo's continued intervention and wood block parading (">tac, tac, tac<"). The ironic disjunction sets up their final staging of robot incapacity, insofar as Ed's entrapment suspends the constrastive visual display of its variably "autonomous behavior" in color-coded terms (Excerpt 3), the exercise's pedagogical point. In flouting this purpose, Carlo and André position themselves as "bad students," temporarily at least.11
3.2 Program scenario: [task formulation/computational thinking]
In ER, a program scenario presents students with a problem for the robot to solve, for which their robot program in turn should provide the solution. In the second exercise examined in this paper, the problem was presented to the students (aged 10–12) in terms of a gardening task: "[Ed] needs to mow the lawn autonomously. The mission counts as successfully accomplished when in each of the eight [garden] parcels there is a trace of felt pen" ([task formulation] in teaching kit). Instead of observing robot Ed and inventorying its possible moves on a desktop, the students were asked to program it effectively, for a particular task (to "mow the lawn autonomously"), which was to be accomplished in a restricted square, divided into squares and printed in green (representing the lawn, see Excerpt 4 below). Again, the task was given to a class of students. In contrast to the previous example, this example shows a group of students being "on task," as they engage in robot programming by formulating its task-specific solution, thus appearing as "good students" in the process.12
In so doing, the students manifest their reasoned engagement in the pedagogical exercise, rather than the subversion of its protocol, an engagement that takes the form of a retrospective-prospective formulation. In the instructor's terms, their joint formulation manifests their [computational thinking] (CT) in situ, the reasoning that goes into finding a programmable solution to a practical task (e.g., Wing, 2006). In instructional material, CT is often characterized as consisting of "our steps with the help of which programming can be taught and done, namely: "decomposition, pattern recognition, abstraction, and algorithm [creation]" (BBC, 2022). In the present case, the gardening task (for "[Ed] […] to mow the lawn autonomously") might be decomposed into "smaller, more manageable parts" (BBC, 2022: 1) (e.g., by progressing by one garden parcel at the time). Second, patterns may be recognized as robot Ed attempts to manage those parts as sub-tasks (i.e., as manifest similarities in their tentative solutions). Third, abstraction helps single out key information for problem solution, discarding irrelevant and focusing on relevant details for (sub-)task achievement (e.g., the wood plank that encloses the green lawn). Finally, algorithm creation integrates the three preceding steps—all of which translate a practical task into a computable one—to devise a step-by-step, procedural, and programmable solution to the so-translated task or problem (e.g., the gardening task). How is CT deployed in situ? A closer look at Excerpt 4 is in order.
Excerpt 4. Continuous formulation of robot programming ([Computational thinking])
Open in a separate windowA pervasive feature of the "on task" episode above is that its main participants, Kim and Tom, spell out their [computational thinking] (CT) in and as its course (incidentally, they appear as the main participants of the scene via their continuous formulation). First, Kim's retrospective formulation of the initial task ("[Ed] need[ing] to mow the lawn autonomously") decomposes the task into candidate subtasks (e.g., "[Ed] shouldn't touch the enclosure", Excerpt 4, line 001; "it should turn BEFORE", line 002). Second, Kim prospectively formulates in terms of a possible algorithm how these subtasks could be achieved, setting out by expressing them in terms of two if-then sequences (007–022) and qualifying them as part of a "complicated" series (016). In the process, Tom supports Kim's formulation, completing the first if-then sequence (023), before challenging Kim's abstraction by flagging (potentially) problematic implications of the image sequence(s) (032–038, 055–056). He does so by taking the robot Ed into his hands to demonstrate those implications, suggesting, for example, how the robot would start turning on its own axis (037–038) or start bumping into the enclosure (055–056). Kim takes Ed into her hands, too. Yet she does it for a different purpose, namely, to demonstrate the overall pattern in terms of which her algorithm, composed of the two if-then sequences, should allow them to achieve the gardening task: "[…] you see it works" (062–064).13
3.3 Scenario Reenactments: [tutorial problems/instructive situations]
Why reenact student-robot interaction? In Ethnomethodology's Program, Garfinkel (2002) pleaded for ethnomethodology's "studies [to be] alternately descriptions and pedagogies" (p. 146). The results, in turn, were identified by Garfinkel as tutorial problems that disclose "members' discipline-specific procedures" (p. 145), on the one hand (e.g., CT techniques), and lend themselves to being discussed with practitioners (i.e., members), "tell[ing] me [the analyst] what I'm talking about" (Garfinkel, 2002: 145), on the other (if not vice versa, e.g., regarding the purpose(s) of those techniques). For the "on task" and "off task" episodes presently considered, the reenactment of robot-student interaction proves instructive on both counts, giving rise to tutorial problems of disciplinarily empirical and pedagogical interest. The discovery and program scenarios at play—leading to [protocol subversion] and [computational thinking], respectively—may be reenacted and reexamined, if not restaged accordingly—that is, as two contrasting pairs of [tutorial problems/instructive situations]. The ironic qualification "in L.A. or anywhere" marks the ubiquitously comparative twist of practice-based video analysis or video reenactment—to wit: there's no excuse anywhere in the world to abstain from this EM move!14
Empirically, the reenactment of the discovery scenario allowed us to identify (some of) the "myriad of contingencies" (Maynard, 1997:98) that the students would create and deal with when they interacted with robot Ed and as they [subverted the protocol] of the pedagogical exercise (i.e., by entrapping and mocking Ed, rather than describing and discovering its moves). One of the first problems we encountered in reenacting Carlo and André's cooperation proved to be tutorial with respect to their methods at play, including those methods' locally manifest purposes (e.g., blocking Ed) and their temporary outcome (i.e., disabling Ed's machine intelligence in its variably colorful display). Each of those problems led us to notice additional aspects of their collaborative interaction. The screenshot arrangement (in Fig. 2) gives an idea of the kitchen setting where we tentatively reenacted robot encirclement but not its specifically pedagogical interest (hence the as yet empty Fig. 2c square).
Figure 2. Encircling Ed (2a) and Encircling Ed again (2b)
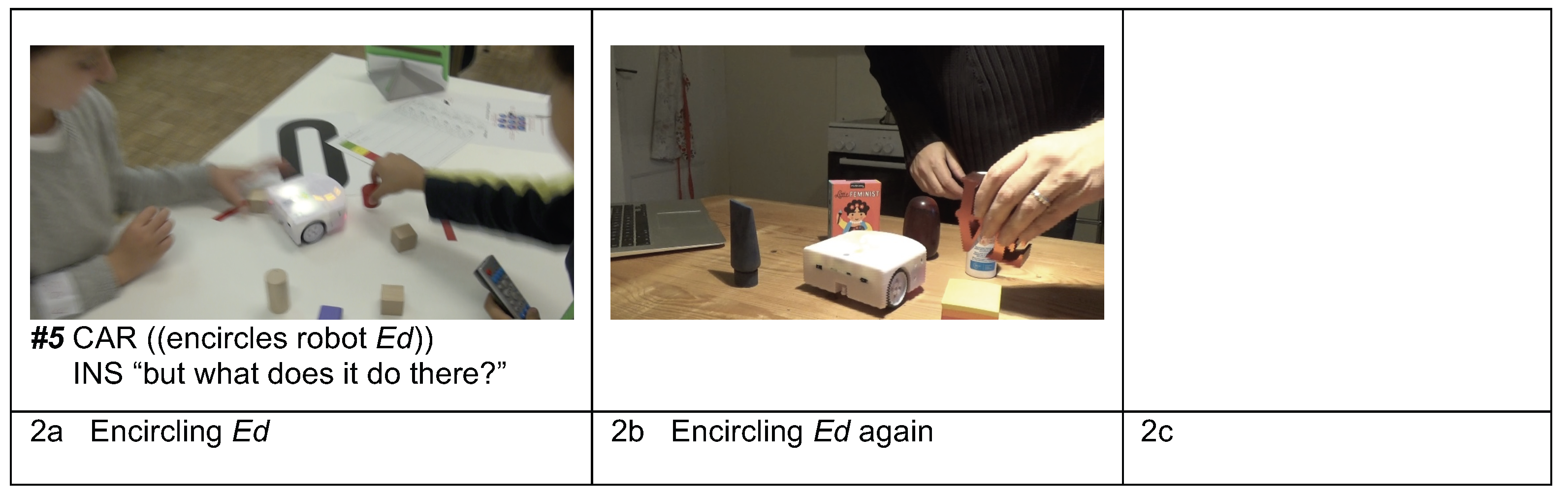
The following field notes illustrate two sets of empirically interesting tutorial problems encountered in the process:
- First, my reenactment attempts at blocking Ed failed, as I didn't anticipate Ed's successively changing directions on time. By contrast, I noticed how students would do so, namely by repeatedly grasping the nearest two wood cubes to position them in Ed's anticipated trajectory which, once the next two-cube wall was detected, would change its direction accordingly, both swiftly and systemically (i.e., depending on Ed's detection angle, triggering recognizable 45° or 90° turns, as now transcribed, e.g., Excerpt 2, 656).
- Second, I didn't succeed in encircling Ed at first either (i.e., by parading the wood block in front of it). In turn, Carlo manifestly did, and that on the visual basis of André's blocking patterns, as those patterns emerged through their repeatedly induced 45° and 90° turns of Ed in the filmed desktop area. In retrying to have Ed turn around its own axis on our kitchen table, I noticed two things: first, I needed to speed up my obstacle positioning and repositioning in front of Ed for it to turn around its own axis continuously; second, lacking my rapidly repeated and progressively displaced impulses (now transcribed as Carlo's speedy ">tac, tac, tac<" noise marking his encirclement attempts), Ed would continue to advance in the direction that it was facing at any given moment.
Pedagogically, the reenactment of the discovery scenario allowed us to identify the instructional (in addition to the empirical) interest of Ed's encirclement. Not only did the desktop cooperation by students (re)appear to close down machine intelligence as an empirical interpretation of Ed's troubled trajectories (e.g., Fig. 2a, #5), but our local reenactment with proxy materials at hand (Fig. 2b) also found in their contingent cooperation an alternative pedagogy of a Newtonian kind: the geometrical demonstration of the conservation of angular momentum (see Fig. 2c' below).15
In Newton's Principia, "Theorem I"—the demonstrated theorem—reads as follows: "The areas, which revolving bodies describe by radii drawn to an immovable centre of force, do lie in the same immovable planes, and are proportional to the times in which they are described" (Newton, 1846:103). In and through our reenactment, the demonstration could be found through material specifics, finding in robot Ed an unsuspected simulator of Newtonian physics. The annotated figure below (Figs. 2a', b', c') gives a suggestive idea of that alternative teaching opportunity (with the "situated agency" of students as its starting point).
Figure 2'. Encircling Ed (2a') and Encircling Ed again (2b') to reenact Newton's demo (2c')
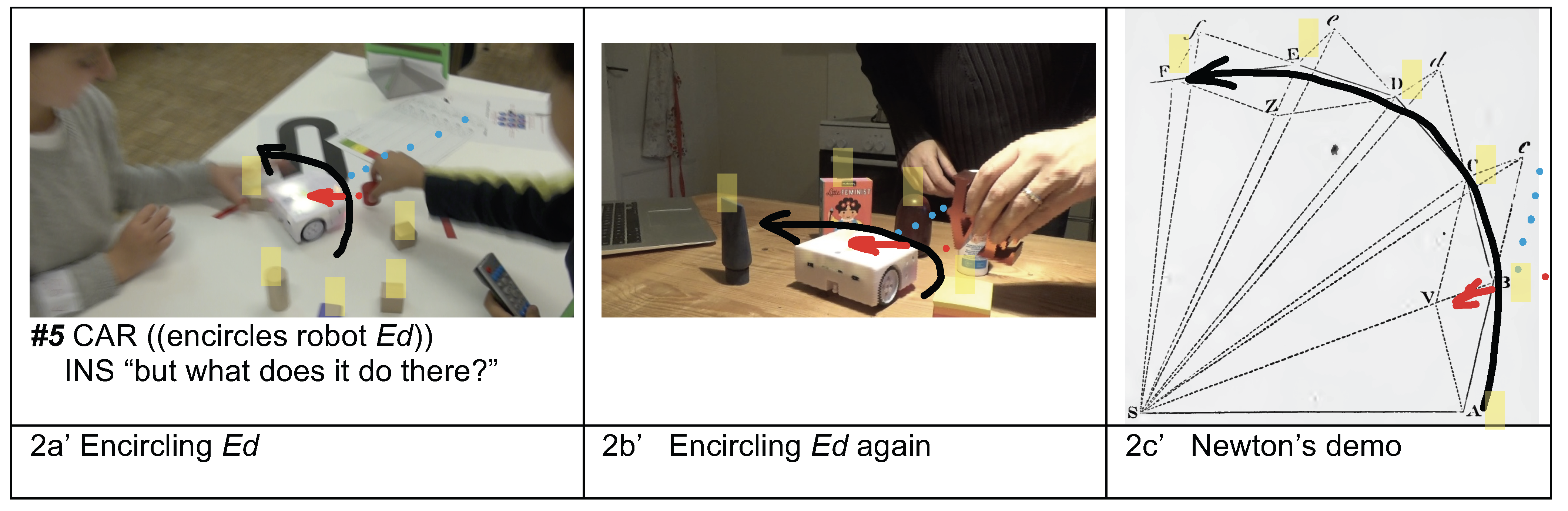
As the above figure suggests, Newton's initial demonstration of the conservation of angular momentum (i.e., as Theorem I) took a geometrical form, articulating how the curve line of a revolving body (around an immovable center S) could be described by the successive multiplication of equal areas (starting from the triangles SAB, SBC, SCD, etc.) with their respective "breadth diminished in infinitum" (1846:111). As we reenacted Carlo's robot encircling, we were reminded of this geometrical form (Fig. 2c'), as that form took shape incipiently, both through Carlo's intervention (Fig. 2a') and our reenactment (Fig. 2b'). Indeed, Ed would have continued advancing in a straight line by virtue of its own "inertia" (as marked by the dotted line in light blue), were it not for my swiftly repeated "impulses" (as marked by the red dot) and the thereby simulated "centripetal force" (as indicated by the red arrow). As a result, Ed changed its course, started revolving around its own axis (Newton's "immovable center"), and with it any little piece of dirt on its outer rim (our "revolving body", as indicated by the black arrow). Let us now turn to our second example, the reenactment of the "on task" episode.16
Empirically, the reenactment of the program scenario allowed us to identify critical contingencies that the students would create and deal with as they engaged in and spelled out their [computational thinking] while using robot Ed for demonstrational purposes (i.e., to question or support its envisaged program). Similar to the previously examined episode, the problems we first encountered in reenacting Kim and Tom's cooperation proved to be tutorial with respect to their methods at play, including those methods' locally manifest purposes (e.g., advancing Ed) and their overall outcome (i.e., having Ed "mow the lawn autonomously"). Each of these problems led us to notice different aspects of their collaborative interaction and to specify that interaction's practical grounds (again, as of now, exemplified below), if not to improve our initial transcription. The screenshot arrangement (in Fig. 3) gives an idea of the hotel suite where we tentatively reenacted robot advancement—again, not of why or what for though, except for our empirical interest to begin with (hence the POV-shot of Ed in the drawer in Fig. 3c).17
Figure 3. Spelling out CT (3a) and Reenacting Spell Out (3b) from within POV-shot (3c)
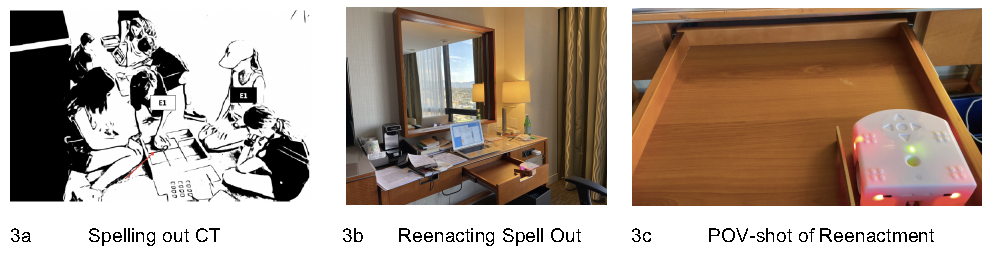
Again, our field notes illustrate empirically interesting tutorial problems encountered in the process:
- First, I did not manage to reenact how students Kim and Tom spelled out their [computational thinking] in and as its articulate course. Instead, I searched my hotel suite. Having only carried robot Ed in my travel bag, I still needed a toy garden to reenact the lawnmower exercise. A rough carpet covered the entire floor—no flat green square, as used in the exercise, was in sight. Neither the bathroom nor the king size bed would do. The slippery floor of the former might, the fluffy cover of the latter surely wouldn't. So, I opened the drawer below the big mirror in the main room and—see there!— an empty square of the right size, appropriately bounded, and with a flat surface presented itself to my ethnographer's gaze (I simply affixed my wooden pocket ruler to the left of Ed in its starting position). By contrast, I started reconsidering the practical selection of relevant details of and for [computational thinking] by students: how would they use the outer rim of the garden square (e.g., to demonstrate the robot's anticipated moves)? What was the point of the gridlines that divided their toy lawn into parcels (my undersurface drawer had none)? And why did students so eagerly sit on the floor, which is unusual for classroom interaction, when it came to their pedagogical exercise (after all, the toy garden didn't look like a real lawn)? In answer to the first two questions, I started amending our transcript (see italicized passages in Excerpt 4, lines 021, 036, 048–049, 056, the screenshot selection still needs to be revisited). The third question in turn was to become part of pedagogical reflection.
- Second, note that I had not planned to analyze, let alone to reenact, the "on task" episode that afternoon, a Sunday afternoon in early August at the Westin Bonaventure [Hotel and Suites] in downtown L.A., the day before my talk at the 2022 Annual Meeting of the American Sociological Association (after all, that paper had already been drafted, albeit only on the first [protocol subversion] clip, and with no reenactment included). So why then reenact, on the spot, [computational thinking] at its best, as manifested by students in the second clip? Why? This became my second tutorial problem that afternoon. The problem presented itself three seconds into the reenactment. As I had pressed Ed's start button, the robot started to advance, then—upon approaching the rim enclosure in front of it—set out with a turn to the left, yet continued its turn and started turning in circles, around its own axis, with no prospect of succeeding with the lawn mowing task (a risk pointed out by Tom in the transcript, Excerpt 4, 037–038). But wasn't there a massive absurdity to this on-the-spot reenactment? Why should I reenact a lawn mowing exercise, then and there, while pondering a mini-robot turning in circles? Didn't age (40+) and setting (a 26th floor suite of the Westin Bonaventure, in front of the Hollywood sign, if only dimly visible on the horizon through the darkened window) suggest that I wasn't in need of such anticipatory socialization (neither in terms of a programming catch up, nor as a matter of career change)? Was this regressive machine behaviorism at its best, but on my part? And what about the gender dimension (traveling with a robot companion, but without kids and partner)? I decided to call it a day, taking the elevator to the ground floor.18
Pedagogically, however, the day wasn't quite over yet (hence also the presently continued field notes): If the "inner horizon" of task reenactment looked absurd to me, then and there, the encountered absurdity invited me to turn to the task's outer horizon—that is, its then and there in situ (that Sunday afternoon, at the Westin Bonaventure, downtown L.A., etc.). What else was happening at the hotel? Earlier in the week, the question had already been answered by an ASA colleague, as she had noticed that the local teachers' union, "United Teachers Los Angeles" (UTLA), was holding its "[2022] Leadership Conference" at the Westin (see Fig. 4 below). Sunday, August 7th, was the last day of the three-day conference. As it was getting late, the afternoon leaning towards 5pm, the question became more pressing, as indeed the local presence of unionized teachers promised a circumstantial answer to it. What might be their view on educational technology, and "educational robotics" (ER) in particular? Was it even on their UTLA agenda? And where would they see ER's pedagogical interest?19
Figure 4. 2022 UTLA Leadership Conference, August 5–7, 2022, Registration Page
With these questions in mind, I took the elevator to the ground floor. Perhaps, some teachers might still linger on at the hotel bar. I walked up and down the bar's circular arrangement twice, only then did I notice two middle-aged women in conversation, each of whom wore a badge. I stopped and presented myself: "Hi, I am X, a sociologist, just wondered whether you were at the union meeting?" – Both of them: "Yes!" After I briefly had explained my project, they agreed to a mini-interview (5–10mins) regarding their UTLA conference, a mini-interview articulated around three main questions: "what did you do at UTLA? What is your main 'take away' lesson? And what's next?". Eventually, ER technology came up in the interview. Before that, however, my interlocutors did not only co-opt me into a familiar conversational pattern, but they also had me see the outer horizon of my robot reenactment under a new aspect. How?
On the one hand, they engaged in the familiar conversational pattern of using "extreme case formulations [as] a way of legitimizing claims" (Pomerantz, 1986: 219). Accordingly, my interlocutors first formulated their union's claims, both long term (a "20% salary increase," "sustainable solutions to student debt and social inequality," against "school privatization," etc.) and short term (e.g., against a "unilateral, unpaid 4-day extension of the school year" by a "new superintendent," the administrative responsible for the L.A. school district). If the claims as such were already accentuated (e.g., via the use of adjectives), their legitimatization then also took the form of distinctively identifiable extreme case formulations, such as the mocking depiction of the new superintendent as a James Bond on holiday, at least in terms of his (alleged) media appearance: "he's been horseback riding, and parachute jumping, and going to dodger games and- ". This formulation by one of my interlocutors, by virtue of her self-identification as a unionized teacher, could then also be heard as an "indirect complaint" (Pino, 2016) more broadly.20
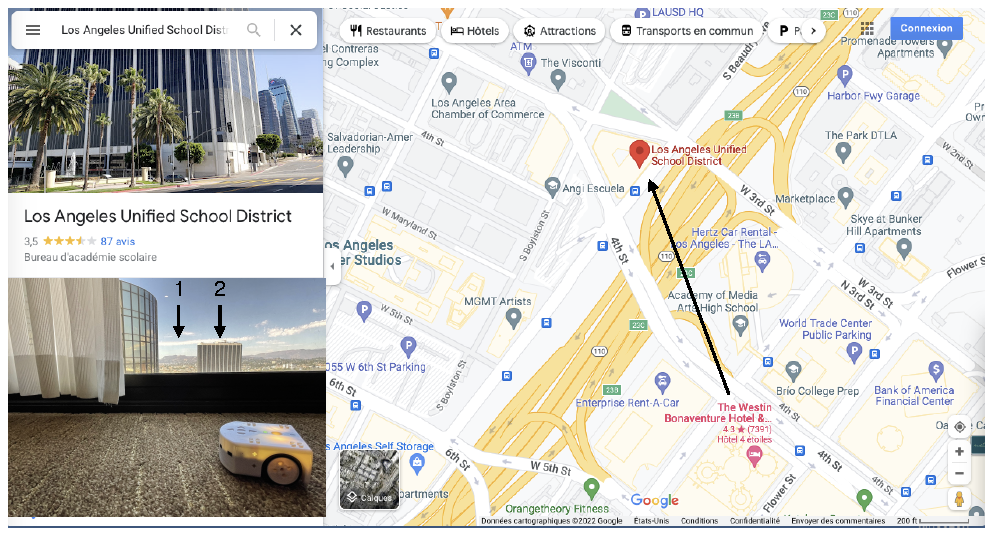
On the other hand, my two interlocutors, the two unionized teachers from L.A., did not only involve me in their familiar ways of speaking. They also taught me, if incidentally, how to see the hotel scene of my robot reenactment under a new aspect. By coincidence, as they explained, the 2022 UTLA Leadership Conference at the Westin (on South Figueroa Street) was taking place opposite its main addressee—the Unified School District administration and its new superintendent for L.A.—located in the building visible from my hotel suite (on South Beaudry Avenue). Earlier in the afternoon, I had not only been staging Ed (as shown in the picture taken in Fig. 5 below) in front of the distant Hollywood sign (1), but also—if unknowingly—in front of that Administration building (2). If the map (integrated to Fig. 5) indicates geographical proximity, the change in aspect seeing thus also proves instructive with respect to the "epistemic politics of [visual representation and] video [analysis] in robotics" (Lipp, 2022:5), if not a "politics of experience" (Pollner, 1975:421) more broadly. Taken together, visual representation (Ed staged in front of the Hollywood sign upstairs) and video analysis (Ed analyzed in action and interaction downstairs, so to speak) may contribute to nurture a clichéd version of educational robotics all too easily (if only by taking for granted the everyday world in its scenic features and accepted routines). Instead, our second scenario reenactment reminded us of the contingent character of the mundane background of that very project—its Lebenswelt and, as part of it, its outer horizon.
Figure 5. Ed in front of the Administration building (2), not only the Hollywood sign (1)
4. Conclusion: Provoking EM/CA, From "Reflexive Conundrum" to Heuristic Difference(s)
Some concluding remarks are in order as to how and why the provocative impetus of STS (Woolgar, 2004) can, and perhaps should, be leveraged for prospective EM/CA studies, be it on their historically alluring home turf, L.A., or anywhere else. In probing student-robot interaction in situ, the purpose of this paper was twofold: empirical (i.e., regarding the interaction/instruction nexus) and programmatic (i.e., regarding the EM/CA relationship). To begin with, we identified educational practices in situ not only as a theme of common interest to EM/CA, but also as a phenomenon on whose situated availability a programmatic difference was marked in the literature (Section 2). In turn, the practice-based video analysis of two contrasting scenarios in student-robot interaction probed in each case how the interaction unfolded, before explicating how its troubled reenactment had us notice (some of) the critical contingencies that participants took into account in the interaction's course (Section 3). Empirically, students appeared to be "off task" in one case ("subverting the protocol," as the instructor put it), and "on task" in the other (engaging in "computational thinking", as requested). Pedagogically, however, our reenactment also suggested how "off task" conduct could be leveraged for a classic Newtonian demonstration (perhaps to be taken up by our instructor), while "on task" conduct raised the question of machine behaviorism and its problematic politics, potentially reducing situated agency to code conformity (via a perhaps unusual reenactment in downtown L.A.). How might these EM/CA results bear on the programmatic discussion, at least from the perspective of the presently developed hybrid study of instructional work? To conclude on that question, we may usefully consider two senses of "provoking EM/CA" (both with and against Woolgar's perspective from STS).
Overall, the paper aimed at offering a provoking EM/CA study, insofar as it attempted to leverage video reenactments for the reflexive explication of student-robot interaction in situ. Was the attempt successful? One possible objection is to challenge the paper for the reflexive conundrum it seems to nurture—that is, the auto-ethnographer's mistake of considering that "reflection on the researcher's own experience must be a central and critical concern when understanding the social life of some [other] setting" (Anderson & Sharrock, 2013:20). As an EM/CA study, however, our methodological aim (as argued for by Anderson & Sharrock) was to "do justice to the patent and overwhelmingly unquestioned objectivity that social structures have in our daily lives" (Anderson & Sharrock, 2013:20; emphasis in original). In particular, the video reenactments, and perhaps only if reflexively indulged in, allowed us to tease out the interactive production of objective properties by and for participants, in and as their student-robot interaction in situ—be it mathematico-physical properties (as via Phil's kitchen) or social-political facts (as via the Westin Bonaventure hotel), properties and facts which are to be found again in other settings (e.g., those studied to begin with), if not as formal structures (i.e., regardless of their production staff).21
In what sense, then, might the paper be provoking EM/CA (i.e., as a grammatical object, rather than gerundive qualification)? For Woolgar, STS set out as an academic provocation, insofar as it challenged received histories and philosophies of natural sciences of various persuasions, notably "rationalist" and "realist" (see Woolgar, 2004). However, as STS has become institutionalized, this provocative impetus has faded, typically in favor of expertise and consultancy (ibid.). Pollner (1991) has suggested a similar fate for EM/CA, a suggestion that inspired Woolgar's STS genealogy. However, longstanding practitioners in those fields have argued that this applies more to formal CA than to reflexive EM (most recently, see Button et al., 2022). In turn, the present paper might be read as provoking EM/CA as a target object in two ways. First, the paper puts a series of follow-up questions to Garfinkel's Lebenswelt pair concern. The questions are: if the "world is wild with pairs" (Garfinkel, 2021:33), what "world" is being talked about? How has it been produced to be "wild with pairs"? And how indeed has this or that "world" (or Lebenswelt) been produced so that these or those "pairs" become constitutive of its "wild" part(s)? The video reenactments offer some empirical/pedagogical answers to those questions in material specifics. For example, for [robot programming/robot behavior] to become a distinctive Lebenswelt pair, it needs to have been taught, tinkered with, if not trusted, as part of an instructive situation (made up of instructed actions and IRE sequences, yet arguably not reducible to either). Second, the paper may provoke some EM/CA lines of research by showcasing their "heuristic difference(s)"— that is, instead of arguing for their common ground, methodological or historical, the paper pleads for acknowledging their multifaceted differences, neither as an internal controversy nor as a "creative chaos", but as a surprisingly rich resource for further inquiry, at least when it comes to the reflexive explication of social practices in situ and provoking situations for just that purpose.
Acknowledgments
Acknowledgments are due to the editors of this special issue, Samira Ibnelkaïd and Iuliia Avgustis, Kristian Mortensen, two anonymous reviewers, as well as Yelena Gluzman and Dirk vom Lehn for their helpful remarks on previous drafts of this paper. Special thanks are due to Morgane Chevalier for sharing video footage and encouraging us to engage with the phenomenology of computational thinking. We also thank the organizers and participants of an EM/CA session held at the 2022 Annual Meeting of the American Sociological Association session in Los Angeles at which the paper was first presented. The paper was supported by SNF grant no. 407740_1187541. Remaining mistakes are ours.
References
Anderson, R.J., Sharrock, W.W. (2013). The Gentle Seer: The Unappreciated Prescience of Egon Bittner's 'Objectivity and Realism in Sociology'. Ethnographic Studies. 13:18–29.
BBC (2022). Introduction to Computational Thinking. Bitesize: K3 Subjects. Accessed 1 Oct 2022, https://www.bbc.co.uk/bitesize/guides/zp92mp3/revision/1
Ben-Ari, M., Mondada, F. (2018). Elements of Robotics. Cham: Springer.
Bjelić, D. (1996). Lebenswelt Structures of Galilean Physics: The Case of Galileo's Pendulum. Human Studies. 19, 409–432.
Bridle, J. (2017). Autonomous Trap 001. Artwork, Accessed 9 June 2023, https://jamesbridle.com/works/autonomous-trap-001
Broth, M., Laurier, E., Mondada, L. (Eds.), (2014). Studies of Video Practices. Video at Work. London & New York: Routledge.
Button, G., Lynch, M., Sharrock, W. (2022). Ethnomethodology, Conversation Analysis and Constructive Analysis. On Formal Structures of Practical Action. London & New York: Routledge.
Campa, A.J., Dixson, B., Blume, H., Toohey, G. (2023). Mayor Bass mediating ongoing LAUSD strike; schools to remain closed Thursday. Los Angeles Times 22 March 2023. Accessed 23 March 2023, https://www.latimes.com/california/story/2023-03-22/lausd-strike-unites-workers-demanding-raises-closes-schools
Chevalier, M., Giang, C., Piatti, A., Mondada,, F. (2020). Fostering computational thinking through educational robotics: a model for creative computational problem solving. International Journal of STEM Education. 39:1-18.
Cohen, I.B. (1960). The Birth of a New Physics. New York: W.W. Norton & Co.
Daugbjerg, M., Syd Eisner, R., Timm Knudsen, B. (2014). Re-enacting the Past: Vivifying Heritage 'Again'. Journal of Heritage Studies. 20(7–8):681–687.
Deppermann, A. (2013). Multimodal Analysis From a Conversation Analytic Perspective. Journal of Pragmatics. 46:1–7.
Dupré, S., Harris, A., Kursell, J., Lulof, P., Stols-Witlox, M. (Eds.), (2020). Reconstruction, Replication and Re-enactment in the Humanities and Social Sciences. Amsterdam: Amsterdam University Press.
Fors, H., Principe, L.M., Sibum, H.O. (2016). From the Library to the Laboratory and Back Again. Ambix. 63(2), 85–97.
Garfinkel, H. (2002). Ethnomethodology's Program: Working our Durkheim's Aphorism. Edited and introduced by A.W. Rawls. Lanham: MD: Rowman & Littlefield.
Garfinkel, H. (2021). Ethnomethodological Misreading of Aron Gurwitsch on the Phenomenal Field. Human Studies. 44(1):19–42.
Garfinkel, H. (2022). Harold Garfinkel: Studies of Work in the Sciences. Edited with an Introduction by M. Lynch. London & New York: Routledge.
Gluzman, Y. (2017). Analyzing the Analyst: An Experimental Data Video for Thinking Theatre and Cognitive Neuroscience Together. Performance Matters. 3(2):107–118.
Goldberg, R. (2011[1979]). Performance Art. From Futurism to the Present. 3rd Edition. London: Thames & Hudson.
Goodwin, C. (2000). Action and Embodiment within Situated Human Interaction. Journal of Pragmatics 32:1489–1522.
Greiffenhagen, C. (2012). Making Rounds: The Routine Work of the Teacher during Collaborative Learning with Computers. Computer-Supported Collaborative Learning 7, 11–42.
Heath, C., Hindmarsh, J. (2002). Analysing Interaction. Video, Ethnography, and Situated Conduct. In T. May (.), Qualitative Research in Action (pp. 99–121). London: Sage.
Heintz, B. (1993). Die Herrschaft der Regel. Zur Grundlagengeschichte des Computers. Frankfurt a.M. & New York: Campus.
Hester, S., Francis, D. (Eds.) (2000). Local Educational Order: Ethnomethodological Studies of Knowledge in Action. Amsterdam & Philadelphia: John Benjamins.
Höltgen, S. (2016). Resume: Hands-On Retrocomputing. Bochum/Freiburg: Projekt Verlag.
Iberdrola (2023). Do you know how educational robots can help your children to develop? Innovation: Educational Robots. Bilbao: Iberdrola, Accessed 1 March 2023, https://www.iberdrola.com/innovation/educational-robots
Katila, J., Gan, Y., Goico, S., Goodwin, M.H. (2021). Researchers' Participation Roles in Video-based Fieldwork: An Introduction to a Special Issue. Social Interaction: Video-Based Studies of Human Sociality. 4(2), 1–11.
Lipp, B. (2022). Caring for Robots: How Care Comes to Matter in Human-Machine Interfacing. Social Studies of Sience. Online First, 1–26.
Livingston, E. (1986). The Ethnomethodological Foundations of Mathematics. London: Routledge & Kegan Paul.
Livingston, E. (2008). Ethnographies of Reason. Aldershot: Ashgate.
Lynch, M. (2022). Garfinkel's Studies of Work. In D.W. Maynard, J. Heritage (Eds.), The Ethnomethodology Program. Legacies and Prospects (pp. 114–38). Oxford & New York: Oxford University Press.
Lynch, M., Lindwall, O. (Eds.), (In press). Instructed and Instructive Actions. London & New York: Routledge.
Macbeth, D. (2003). Hugh Mehan's Learning Lessons Reconsidered: On the Differences Between the Naturalistic and Critical Analysis of Classroom Discourse. American Educational Research Journal. 40(1), 239–280.
Macbeth, D. (2014). Studies of Work, Instructed Action, and the Promise of Granularity: A Commentary. Discourse Studies. 16(2), 295–308.
Macbeth, D. (2022). Some Notes on the Play of Basketball in its Circumstantial Detail. In H. Garfinkel, Harold Garfinkel: Studies of Work in the Sciences (Appendix 2, pp. 58–70). Edited with an Introduction by M. Lynch. London & New York: Routledge.
Maeder, C. (2020). The Problem of the Definition of Situation in Educational Ethnography. In C. Wieser, A. Pilch Ortega (Eds.), Ethnography in Higher Education (pp. 147–156). Wiesbaden: Springer.
Mäkitalo, Å. (2016). On the Notion of Agency in Studies of Interaction and Learning. Learning, Culture and Social Interaction. 10, 64–67.
Maynard, D. (1997). The News Delivery Sequence: Bad News and Good News in Conversational Interaction. Research on Language and Social Interaction. 30, 93–130.
Mehan, H. (1979). Learning Lessons. Social Organization in the Classroom. Cambridge, MA: Harvard University Press.
Miserli, A., Komis, V. (2014). Robotics and Programming Concepts in Early Childhood Education: A Conceptual Framework for Designing Educational Scenarios. In Karagiannidis, C., Politis, P., Karasavvidis, I. (Eds), Research on e-Learning and ICT in Education (pp. 99–118). New York: Springer.
Mondada, L. (2018). Multiple Temporalities of Language and Body in Interaction. Challenges for Transcribing Multimodality. Research on Language and Social Interaction. 51(1):85–106.
Newton, I. (1864). Newton's Principia. The Mathematical Principles of Natural Philosophy. New York: Daniel Adee.
Pelikan, H., Broth, M., Keevallik, L. (2022). When a Robot Comes to Life: The Interactional Achievement of Agency as a Transient Phenomenon. Social Interaction: Video-Based Studies of Human Sociality. 5(3):1–36.
Pino, M. (2016). Delivering Criticism through Anecdotes in Interaction. Discourse Studies. 18(6):695–715.
Pollner, M. (1975). 'The Very Coinage of Your Brain': The Anatomy of Reality Disjunctures. Philosophy of the Social Sciences. 5, 411-430.
Pollner, M. (1991). Left of Ethnomethodology: the Rise and Decline of Radical Reflexivity. American Sociological Review 56(3):370 –380.
Pomerantz, A. (1986). Extreme Case Formulations: A Way of Legitimizing Claims. Human Studies. 9(2-3), 219–230.
Revaz, B., Sormani, Ph. (2008). Heuristics Gone Anachronistic? Recovering Newton's Demonstration of the Conservation of Angular Momentum. Paper presented at ScienceFutures – STS CH Meeting. Zurich: ETHZ, Saturday 9 February 2008.
Riedo, F. (2015). Thymio: A Holistic Approach to Designing Accessible Educational Robots. PhD Thesis, Lausanne: EPFL.
Sacks, H. (1984). Notes on Methodology. In J. Heritage, J.M. Atkinson (Eds.), Structures of Social Action: Studies in Conversation Analysis (pp. 2–27). Cambridge: Cambridge University Press.
Smith, P.V. (2021). Introduction: Respecifying Education. Ethnographic Studies. 18, 1–19.
Sormani, Ph. (2014). Respecifying Lab Ethnography. An Ethnomethodological Study of Experimental Physics. Aldershot: Ashgate.
Sormani, Ph. (2016). Practice-based Video Analysis: a Position Statement. Societa, Mutamento, Politica. 7, 103–120.
Sormani, Ph. (2019). Reenactment as a Research Strategy: From Performance Art to Video Analysis and Back Again. In Borgdorff, H., Peters, P. & T. Pinch (Eds.), Dialogues Between Artistic Research and Science and Technology Studies (pp. 184–200). London & New York: Routledge.
Sormani, Ph., Alač, M., Bovet, A. & Greiffenhagen, C. (2017). Ethnomethodology, Video Analysis, and STS. In U. Felt, R. Fouché, C.A. Miller & L. Smith-Doerr (Eds.), Handbook in Science and Technology Studies, 4th . (pp. 113–137). Cambridge, MA: MIT Press.
Sudnow, D. (1978). Ways of the Hand: The Organization of Improvised Conduct. Cambridge, MA: MIT Press.
Streeck J., Goodwin, C., LeBaron C. (Eds.), (2010). Embodied Interaction. Language and Body in the Material World. Cambridge: Cambridge University Press.
ten Have, P. (2001) Applied Conversation Analysis. In McHoul, A., Rapley, M. (Eds.), How to Analyse Talk in Institutional Settings. A Casebook of Methods (pp. 3–11). London & New York: Continuum.
Turing, A.M. (1936). On Computable Numbers, with an Application to the Entscheidungsproblem. Proceedings of the London Mathematical Society. 42, 230–265.
Tutt, D., Hindmarsh, J. (2011). Reenactments at Work: Demonstrating Conduct in Data Sessions. Research on Language and Social Interaction. 44(3), 211–2306.
Wieder, D.L. (1978). 'Telling the Code'. Jedermanns-Soziologie und soziale Realität. Kölner Zeitschrift für Soziologie und Sozialpsychologie. 20, 353 –375.
Wieder, D.L., Zimmerman, D.H., Raymond, G. (2010). UCLA: Then and Now. In Leeds-Hurwitz, W. (.), The Social History of Language and Social Interaction Research: People, Places, Ideas. Cresskill, NJ: Hampton Press, pp. 127–158.
Wing, J. (2006). Computational Thinking. Communications of the ACM. 49(3), 33–35.
Woolgar, S. (2004). What Happened to Provocation in Science and Technology Studies. History and Technology? 20(4), 339–349.
1 On reenactment in archeology, history, and heritage studies, as well as design, contemporary art, media studies, and video ethnography, see inter alia Daugbjerg et al. (2014), Dupré et al. (2020), and Sormani (2019). Dupré et al.'s introduction alone counts more than 60 references. Gluzman (2017) suggests to analyze the analyst in and as an artistic context.↩
2 As a hybrid study of instructional work, the paper's thematic interests are both empirical and pedagogical. Yet their specific character and mutual relation need to be explored, in and as part of the hybrid study. As M. Lynch explains, "Garfinkel places [EM] in a contingent relationship with what counts as 'data,' 'models,' and 'structures' – the form and salience of such methodological resources would need to be discovered in and through engagement with the particular methods used at a given worksite. Indeed, what the work and its site might look like remain to be discovered" (Lynch, 2022: 127; emphasis in original).↩
3 For a media archeology of hands-on retrocomputing of related interest, see Höltgen (2016).↩
4 In Ethnographies of Reason, Eric Livingston emphasizes the heuristic interest of ethnomethodological research in the first person singular: "if I want to do original work, I have to see what it is that I'm talking about" (2008: 138; emphasis in original). ↩
5 In a chapter entitled "UCLA: then and now," D.L. Wieder et al. (2010) offer a "disciplinary history of EM/CA ['then'] from the standpoint of contemporary CA ['now']" (M. Lynch, personal remark). In turn, this paper will draw upon its recent presentation in Los Angeles (see Acknowledgments) to factor in contemporary EM to CA routine in view of a hybrid study of educational robotics (see Section 3 below). ↩
6 In the epigraph, Garfinkel is alluding to the paired character of an "instructed action," comprising a discursive and practical part (e.g., a partition and its interpretation), while highlighting the pair's worldly embedding (e.g., as part of a musical performance, style, or tradition). The "praxeological validity" of an instructed action, then, is that of a "Lebenswelt pair" (see, e.g., Garfinkel 2002:187–190). ↩
7 The outlined EM/CA difference marks a heuristic tension between self-instructive ethnographies and interaction analysis of educational settings (e.g., Hester & Francis, 2000). That is to say, there are at least two interestingly related ways of "respecifying education" (Smith, 2021). ↩
8 For a genealogical account that traces video reenactment(s), and practice-based video analysis in particular, to the joint history of EM/CA in and across STS, see Sormani et al. (2017). ↩
9 Pseudonyms have been used to identify participants in student-robot interaction. Hence we decided to nickname the involved robot, too. On the original "Thymio" robot, see e.g. Riedo (2015). ↩
10 Despite or precisely because of the novel character of the mobile robot, the classroom routine was found to be administered, again and again, across our corpus of video recordings. The brackets [ ] used in the subtitle above point to the purpose of the ensuing analysis, namely: to make explicit the mundane course of instructed action (or Lebenswelt pair, marked by square brackets, [ ]) which the analyzed sequence (IR-) contributes to exhibit, if only by suggesting how some students were failing in accomplishing the task at hand (-E; a negative evaluation). ↩
11 The finite set of color modes (potentially displayed by the robot and/or to be noted down) finds its rudimentary expression in Turing's "table of behaviors" (1936) which, as Heintz already pointed out, is "nothing else than a specific form of presenting an algorithm" (1993:82). In entrapping the robot, the two students work against such a presentation, temporarily at least—that is, until reminded by the teacher or instructor to get back "on task." ↩
12 While the IRE sequence allowed the involved instructor to distinguish between "on task" and "off task" engagement, the category pair "good students" versus "bad students" could be predicated and elaborated in the vein of that situated distinction—be it by the instructors, students themselves, or participant observers. For a prior experimental study, see Chevalier et al. (2020). ↩
13 As readers may have noticed, the main focus of the video analysis was situated agency as displayed by students in interaction. For it to appear or disappear, "robotic agency" (Pelikan et al., 2022:2) hinged upon "on task" or "off task" priorities set by the students involved.↩
14 At least not in and for a hybrid study of instructional work, and this one in particular, we should probably add. The expression "ubiquitously comparative twist" alludes to the possibility of having any filmed episode of interaction reenacted anywhere, where this ubiquitous possibility provides the analyst/performer with a reflexive, practice-based opportunity to reexamine her initial, transcript-assisted analysis of the episode. For further discussion of reenactment rationale(s), see Sormani (2016, 2019). ↩
15 It should be added that the potential pedagogical interest is in and for introductory physics at university level, although the school curriculum might (and typically does) offer openings to anticipate some of its basic concepts, Aristotelian or Newtonian (Revaz & Sormani, 2008). ↩
16 By the second set of "tutorial problems listed above, readers may already have anticipated the presently elaborated Newtonian lessons (including not only the "law of inertia", but also the "accelerated character of circular movement," Cohen, 1960:180). Nota bene: this pedagogical interest was found, and explicated, through our practical reenactment of the initial [protocol subversion] by our "bad students." In the process, we also noticed a series of longstanding conceptual contrasts (i.e., between action and behavior, syntax and semantics), as well as the formal similarility with recent AI-critical artworks, such as James Bridle's Autonomous Trap 001 (Bridle, 2017). ↩
17 The abbreviated expression ("POV-shot") stands for point of view-shot (i.e., camera subjectiva), the shot filmed from within an unfolding activity (e.g., robot programming). ↩
18 The fact that the reported reenactments were both solo performances was largely coincidental. Incidentally, it offers an opportunity to reflect upon, if not expand, teacher agency in addition to its student version (cf. Mäkitalo, 2016). ↩
19 In Garfinkel's terms, the concern was to (have them) "tell me what I'm talking about" (2002:145). ↩
20 Indeed, she completed her turn at talk by highlighting that "teachers and students and parents have no idea of how the school year is going to start." To our knowledge, the 2022 school year did start, although strike action (in the L.A. area) did not stop in 2023 (Campa et al., 2023). ↩
21 Indeed, at the time of writing, strike actions by local unions in Switzerland seemed to be in the works along lines similar to those elaborated on by our two unionized teachers from L.A. (anticipating newly appointed administrators, challenging seemingly unilateral decisions, demanding salary increases, etc.). The question of what to make of them—these or those strike actions—is beyond the scope of this paper, however. ↩