Social Interaction
Video-Based Studies of Human Sociality
Multi-Sensory Perception during Palpation in Japanese Midwifery Practice
Aug Nishizaka
Chiba University, Japan
Abstract
This paper demonstrates ways in which vision is integrated with other modalities of perception in a manner relevant to a temporally unfolding activity. It will do so by analyzing a single episode extracted from an abdominal palpation conducted on a pregnant woman by a midwife in Japan. The episode forms a “natural experiment” through which one can demonstrate that the integrated visual and tactile perception of an object is organized differently according to the status of the ongoing activity in which it is embedded. Data are in Japanese with English translations.
Keywords:
Multi-sensory perception, Midwifery, Conversation analysis, Palpation, Local order to activity
1. Introduction
In a series of papers, C. Goodwin (1994, 1996) and C. Goodwin & M. H. Goodwin (1996) radically de-psychologized the notion of vision by re-specifying it as publicly achieved in a distinct unfolding activity, rather than treating it as a process privately lodged in the mind or the brain. Inspired by their insights, I will in this article demonstrate ways in which seeing is integrated with other modalities of perception, specifically touch, in a manner relevant to the status of a temporally unfolding activity. I will do this by analyzing a single episode extracted from an abdominal palpation conducted on a pregnant woman by a midwife. This episode took place at a Japanese midwifery practice operated by an independent midwife.1 I will look closely at the manner in which the participants organize their perception of an object, namely, the fetal shape depicted on the pregnant woman's abdomen by the midwife's hand movements. Their perception is multi-modal (or multi-sensory) in that they perceive one identical object both visually and tactilely.
The term “multi-modal” used here is broader in reference than the term “multi-sensory”, as not all multi-modal perception is necessarily multi-sensory. When we see and touch something, we have multi-sensory perception – what Husserl (1973, p. 73) called gemischte Wahrnehmung or mixed perception (i.e., mixed from multiple sensory inputs). In contrast, when we see both the rigidity and fragility of glass without touching it (Merleau-Ponty, 2012 [1945]:238), we have a multi-modal but not multi-sensory perception, because we have only one sensory input – in this case, visual. As Merleau-Ponty (ibid.139) suggested, we inhabit a world in which modalities of perception are fundamentally interrelated. I do not address this in detail here; however, I will focus instead on the empirical issue of how multi-modal perception becomes relevant in the actual course of a distinct activity: the activity of offering an account of the changed position of a fetal part during abdominal palpation conducted by a midwife.
There have been a number of recent interaction studies on human-to-human touch that focus on its functions in interaction, such as controlling others’ behavior (Cekaite, 2015, 2016; Goodwin & Cekaite, 2018), creating affective links with others (Cekaite & Kvist, 2017; Goodwin, 2017; Goodwin & Cekaite, 2018), and demonstrating manual operations to others (Lindwall & Ekström, 2012) via touching specific body parts in certain ways. Other studies have focused on more structural features, such as how touch relates to syntactical constructions (Nishizaka, 2016). In all of these studies, touch is explored in conjunction with talk in the temporal and spatial arrangement of multiple bodies and the material structures of the environment.
In contrast to the above body of work, this paper focuses on the perceptual aspect of touch, namely, what one feels by touching another’s body parts in certain ways. The main idea here is that perception itself, not merely the environment for interaction, can be multi-modal or multi-sensory. Several years ago, I investigated multi-sensory perception, specifically, the integration of visual and tactile perception, in referencing acts in the analysis of episodes from interactions in a Japanese midwifery setting (Nishizaka, 2007; c.f. also Nishizaka, 2010, 2011, 2017). In this article, I will expand upon this investigation by focusing on the relationship between different organizations of multi-sensory perception and different local orders of activity.
When discussing “professional vision,” Goodwin (1994) proposed a perspectivist view of vision:
All vision is perspectival and lodged within endogenous communities of practice. An archaeologist and a farmer see quite different phenomena in the same patch of dirt ... An event being seen, a relevant object of knowledge, emerges through the interplay between a domain of scrutiny ... and a set of discursive practices ... being deployed within a specific activity... (p. 606)2
Professional (i.e., allegedly “objective”) vision is also perspectival, particularly because, just like nonprofessional, ordinary types of vision, it depends on the specific activities in which the community of each profession engages. It was Nietzsche (2006 [1887]) who advocated a radical perspectivism of knowledge and seeing:
There is only a perspectival seeing, only a perspectival “knowing”; the more affects we are able to put into words about a thing, the more eyes, various eyes we are able to use for the same thing, the more complete will be our “concept” of the thing, our “objectivity.” But to eliminate the will completely and turn off all the emotions without exception, assuming we could: well? Would that not mean to castrate the intellect? (p. 87).
Nietzsche here argues that seeing and knowing originates in the will and the emotions, neither of which can be eliminated in principle. Thus, for the attainment of knowledge, “the difference in perspectives and affective interpretations” (ibid.) should be used as an advantage rather than interpreted as limitation that must be overcome.
For Nietzsche, perception was inescapably contaminated by affective interpretations and was unavoidably perspectival with respect to “interpretative powers” (ibid.). For Goodwin, perception was perspectival with respect to specific activities. Drawing on Goodwin’s perspectivism, through an analysis of abdominal palpation conducted on a pregnant woman by a midwife, I will argue that perception is a constituent part of the specific activity within which it is embedded. What one perceives can be re-specified as an organizational feature of the local order of a specific activity. It is directly observable in the details of participants’ discursive and embodied practice within the activity, and there is no need to interpret their interpretations (see Coulter, 1994).
2. Data and methods
My colleagues and I video-recorded thirteen interactions between pregnant women and independent midwives from 2003 through 2008. Thirteen pregnant women and five different midwives participated in our study. We obtained informed consent from all participants. Using conversation analysis (Sacks, Schegloff, & Jefferson, 1974; Schegloff, 2007), I will here analyze one episode in which a midwife palpates a pregnant woman. The midwife in the episode conducted all routine examinations of the fetal and uterine condition with her hands after the 27th week of pregnancy. For example, she touched the head, spine, and buttocks to determine the fetal presentation and position. I focus on how perception of the depicted fetal shape is differently organized according to whether the fetal shape is demonstrated as such, or only referenced to point out the position of a particular fetal body part, that is, the buttocks. The episode forms a “natural experiment,” where the conditions under which the same action of showing the fetal shape is performed are naturally controlled. In other words, the episode includes two different sub-activities within which integrated visual and tactile perception of the depicted fetal shape is organized differently as a constituent part of each.
First, I will explore the organization of the midwife’s demonstration of the fetal shape, occasioned by the pregnant woman’s report of a change in the felt location of the fetal feet; here the midwife provides an account of the change of this location via the demonstration of the fetal shape. I will then go on to explore how the midwife points out the abdominal location of the fetal buttocks by referencing the already demonstrated fetal shape; the demonstration is initiated by the pregnant woman’s request for the confirmation of the location. In these demonstration sequences, the perception of the depicted fetal shape is differently organized. In the concluding section, I will summarize the main points of the analyses.
3. Multi-sensory perception in demonstration
In this particular episode, the midwife (MDW) conducts an abdominal palpation on a woman in her third trimester of pregnancy (PWM). In line 01 of the episode, the pregnant woman reports that the location at which she feels the fetal feet kicking has descended. In lines 03–07, in response, the midwife points out the locations of three fetal body parts on the pregnant woman’s abdomen, by touching them in the pregnant woman’s line of sight. See Appendix for transcription conventions.
Open in a separate windowPositioned immediately after the pregnant woman’s report of the change of the felt position of the fetal feet, the series of the midwife’s pointing out of the fetal body parts is intelligible as an account of the current position of the fetal feet relative to the entire fetal shape. The series is introduced with katachi ga ‘the shape is’ (line 03) and ends with the midwife pointing out the fetal feet with hora ‘look’; this introduces the pointing out of the feet (line 13) and marks the arrival at the destination of the ongoing account.
One may note the sentential construction of the midwife’s utterance (katachi ga kore atama::. ↓senaka:: oshiri::. ‘The shape is, this is the head. The back, the buttocks.’). The phrasal construction of a noun (katachi) plus a nominative case-marking particle (ga), which projects that a predicate is to follow, is nevertheless followed by another complete sentence (kore atama ‘this is the head’); the incipient sentence, initiated with the noun plus the particle, is never grammatically completed. In Japanese interactions, such an apparently ungrammatical construction is not rare. For example, Mori (2014) observes that in Japanese conversation, a cleft construction, which begins with the “what X does” part, is often grammatically incomplete but is used as an “interpretive framework” for the ensuing extended talk. The nominative case-marked noun phrase of the midwife’s utterance here functions similarly to the subjective clause of an incomplete cleft construction; the noun phrase katachi ga ‘the shape is’ provides the framework within which the pointing out of the three fetal body parts (the head, spine, and buttocks) that follows is collected and combined together to depict the entire fetal shape.3 The midwife’s pointing out is therefore intelligible as a mapping of fetal body parts onto the surface of the abdomen precisely because of the linguistic construction with “the shape is” that introduces them.4 In the remainder of this section, I will examine how the pointing out is achieved via talk and gesture.
In this context, the pointing out of each fetal body part is accomplished as involving complex integrated visual and tactile perception. Excerpt 2 is the detailed transcript of lines 03–07 of the episode. When uttering katachi ‘shape’, the midwife puts her hands on the pregnant woman’s lower abdomen, where the fetal head is located, and moves them on it.
Open in a separate windowWhen mentioning the name of each fetal body part, the midwife presses (not only touches) its location in the common visual field; both the pregnant woman and the midwife continue looking at the midwife’s hands touching the abdomen. In doing so, the midwife not only depicts the fetal shape but also demonstrates the fetal shape to the pregnant woman, thereby also demonstrating why the fetal feet have descended. This manner of pointing is appropriate for the accomplishment of the demonstrating activity. In order for the demonstration of the fetal shape to be adequately accomplished, the pregnant woman also has to perceive at each abdominal location that the midwife has evidence for what she is pointing out. Therefore, it is crucial for the midwife to not only touch each location but also press it, thereby doing “feeling” each fetal body part that is lodged under the skin and doing “having evidence” for the demonstration. Thus, the pregnant woman perceives on her abdomen that the midwife feels the fetal body parts at her (the midwife’s) fingertips. In this fashion, the midwife maps what she feels for the pregnant woman onto the surface of the abdomen to demonstrate the current fetal shape.
Note that the midwife uses the “this is X” (kore [ga] X) (line 05) rather than “here is X” (koko [ni/ga] X) format to point out the location of each fetal body part, thereby claiming that she directly feels the fetal body parts themselves with her hands. The utterance may also presume that the recipient (i.e., the pregnant woman) has perceptual access to them (e.g., feels the touched part of the abdominal skin internally pressured by the fetal body parts).5 Furthermore, the use of the object deictic term (“this”) rather than the locative deictic term (“here”) indicates that the focus is not merely on the abdominal location of each fetal body part, but on the fetal shape within the abdomen on which the fetal body parts are being plotted.
In this demonstration, the pregnant woman not only simultaneously sees and feels the location that the midwife points to by touching it in the pregnant woman’s line of sight (or in their common visual field); she also sees and feels (and is in fact invited to see and feel) the skin of the abdomen pressured by the midwife’s hands (and she may also feel the skin of the abdomen pressured from the inside by each fetal part). Thus, the pregnant woman’s perception is so complex that it involves what the midwife feels at her fingertips. This complex multi-sensory perception is a constituent part of the ongoing demonstration.
4. Varieties of multi-sensory perception
The complex multi-sensory perception that I examined in the previous section can be contrasted organizationally with the simpler form of multi-sensory perception observable in lines 10–11, where the midwife depicts the fetal shape by sliding her hands on the abdomen.
After the midwife points out the location of the buttocks (line 07), the pregnant woman initiates a “side sequence” (Jefferson, 1972) by requesting confirmation of the location (line 08). Excerpt 3 is the detailed transcript of lines 07–13 of the episode. In line 09, after providing a minimal affirmative answer (n ‘Yeah’), the midwife tries to feel the buttocks once again and proceeds to depict the fetal shape.
Open in a separate windowThe midwife presses the location of the buttocks but does not press the locations of the head and spine; she only quickly slides her hands on the pregnant woman’s abdomen, from the location of the head to the location of the buttocks. These hand movements are well fitted to the phrasal construction of the utterance in lines 10–11. Firstly, the demonstrative term koo ‘like this’ (lines 10) hearably refers to the movement of the midwife’s hands and not any fetal body part or abdominal location. Secondly, the midwife uses a verb indicating movement (“come”) with the buttocks (or possibly the entire fetus) as its grammatical subject (koko’n kiteru ‘here it comes’ in line 10 and koo::: kiteru ‘like this it comes’ in lines 10–11). Thus, the sliding hand movements depict how the buttocks “come.” Then (in line 11), while making a sliding hand movement again, she adds one descriptive verbal phrase, marumatte ‘curls up’, with the entire fetal shape or the fetus as its subject (as indicated by the verbal phrase plus the hand gesture). Note that the final component te of the phrase marumatte transforms the verb into an adverb; therefore, this phrase sounds like an increment to the preceding sentential unit or “turn constructional unit” (Sacks, et al., 1974) and provides an account of why the buttocks (or the fetus) “comes like this.” The midwife’s sliding hand movement accompanied by the phrase “it curls up” in line 11 is once again made with both of the midwife’s hands from the location of the head to the location of the buttocks. This movement, accompanied by the shape-describing phrase, is clearly visible as depicting the fetal shape, and it also (re)constructs the midwife’s hand movement from line 10 onward as depicting the fetal shape, beginning with the head and leading to the buttocks. Thus, in response to the pregnant woman’s request for confirmation of the buttocks’ location, the midwife points out the location of a particular fetal body part (i.e., the buttocks) relative to the fetal shape.
It is important to note that the pregnant woman uses the locative deictic term koko ‘here’ rather than the object deictic term (pronoun) kore ‘this’ in her confirmation request, thereby bringing the location of the buttocks into focus instead of the buttocks itself. In line 10, the midwife uses the same locative deictic term (koko ‘here’) in responding to the request, although she uses an object deixis (kore ‘this’) in line 09.6 In line 10, the midwife presses the location of the buttocks, thereby doing “feeling the object,” but since this is accompanied by the locative deictic term in line 10, she does not specifically claim that the pregnant woman also have perceptual access to this particular fetal body part.
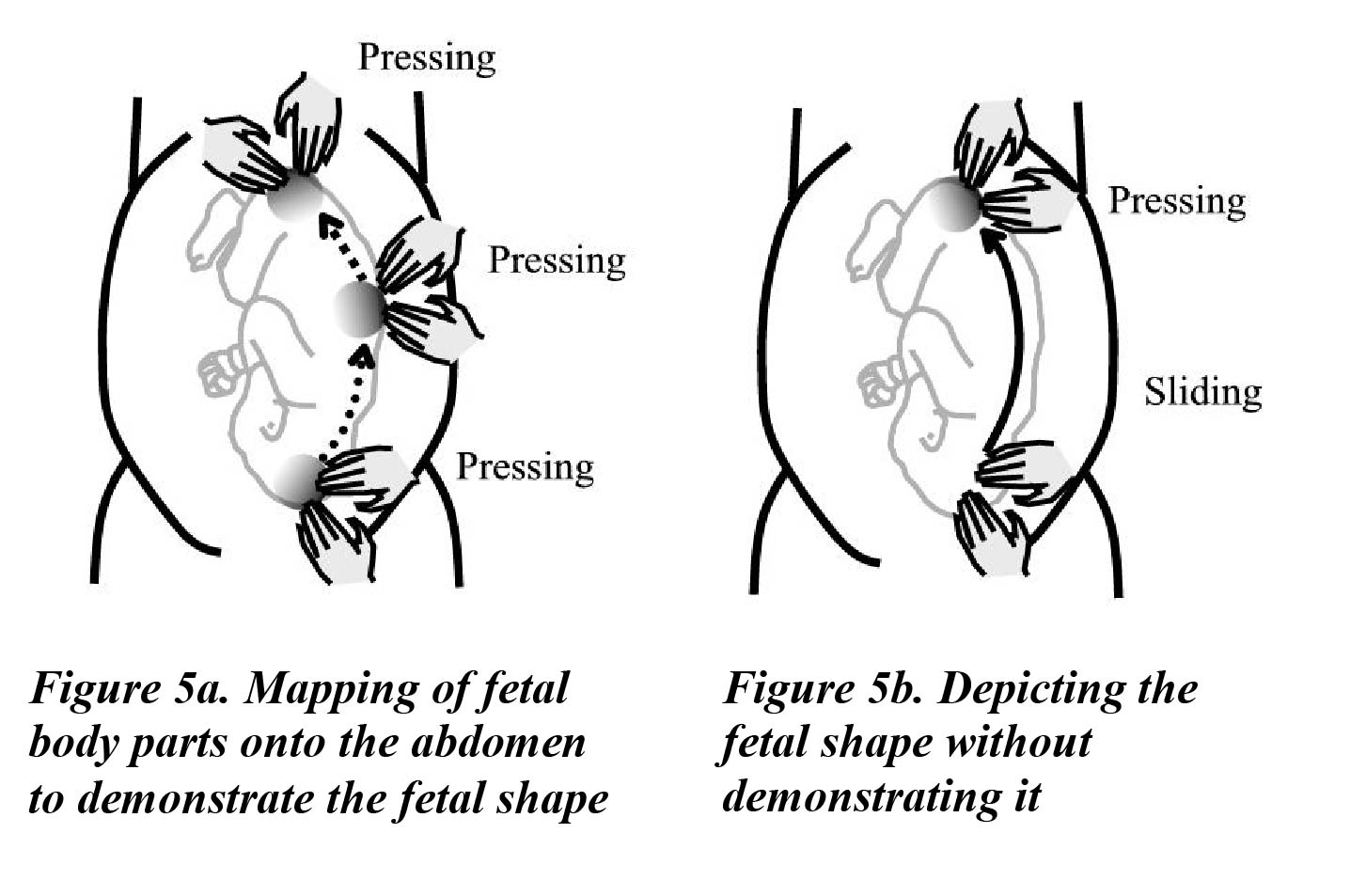
In summary, in lines 03–07 the midwife is providing an account of the current position of the fetal feet via the demonstration of the fetal shape. For this demonstration, the fetal body parts are mapped onto the surface of the abdomen (Figure 5a). In contrast, in the side sequence in lines 08–12, she points out the location of one fetal body part, namely, the buttocks, by referencing the already demonstrated fetal shape (Figure 5b).
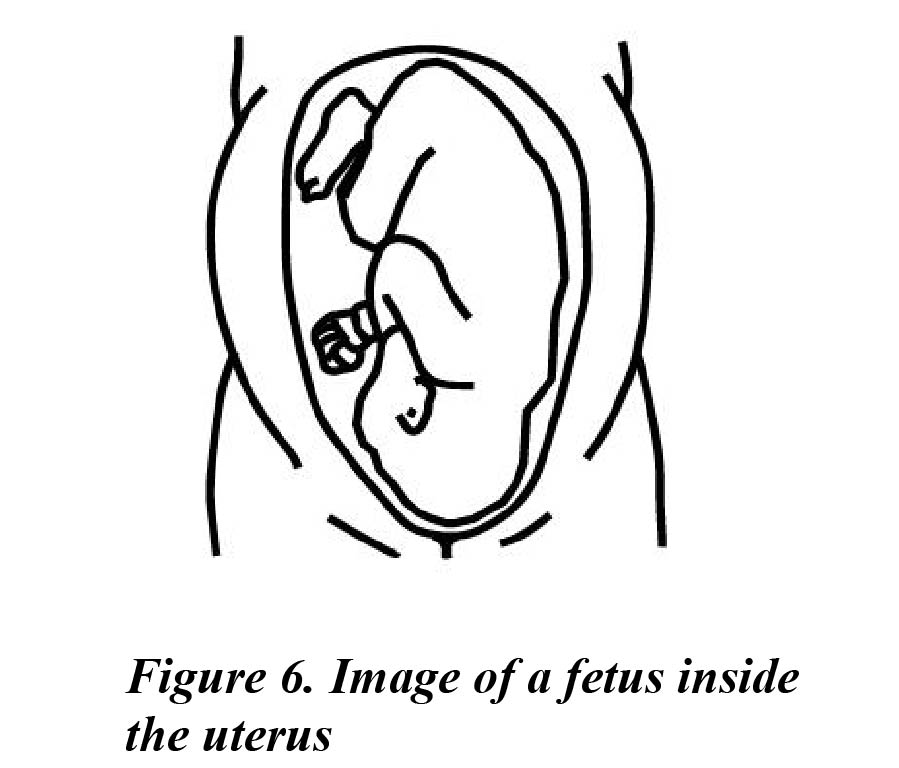
This raises the question of why the midwife references the fetal shape once again (lines 10–11), rather than only pressing the location being inquired about in response to the pregnant woman’s request for confirmation. Note that the pregnant woman’s request for confirmation (“The buttocks, is it here?” line 08), which initiates a side sequence, is also hearable as a pre-sequence (Sacks, 1992; Schegloff, 1980, 2007; Terasaki, 2002) to a request for an explanation addressing a potential contradiction. In other words, the pregnant woman’s request for confirmation projects a request for an explanation of the location of the fetal feet relative to the location of buttocks to be produced on her receipt of an affirmative (go-ahead) response. The reason for hearing this way is as follows. Given the image of the normal (cephalic) fetal presentation (see Figure 6), the current location of the buttocks might appear to be contradictory to the reported fact that the fetal feet descended. The pregnant woman may therefore want to know why the location of the feet has descended even though the location of the buttocks has ascended. In fact, as seen in Excerpt 4, the pregnant woman proceeds to extend her right hand downward immediately after she receives an affirmative response to her request for confirmation from the midwife (“Yeah. This.” line 09). Excerpt 4 is the detailed transcript of lines 08–10 of the episode.
Open in a separate windowAfter the midwife provides a confirmation (line 09), the pregnant woman attempts to move her right hand downward (Figure 7 [b]) but immediately self-aborts the movement when the midwife continues her talk (Figure 7 [c]). This aborted hand movement appears to be an incipient pointing gesture to the location of the fetal feet. In other words, the pregnant woman’s attempted hand movement (Figure 7 [b]) could be interpreted as responding to the midwife’s “go-ahead” response (n ‘yeah’ in line 09) to the “pre-sequence first pair part” (Schegloff, 2007) (i.e., the request for confirmation in line 08), and as an attempt to proceed to an explicit request for an explanation of the location of the fetal feet relative to the location of the buttocks. However, without waiting for the explicit request for an explanation, the midwife preemptively points out the position of the buttocks relative to the entire fetal shape. This pointing out is also intelligible as an explanation of the current position of the fetal feet relative to the buttocks. In fact, once the midwife’s ongoing turn becomes recognizable as the preemptive provision of the explanation, at its first possible completion (line 11), the pregnant woman only offers an acknowledgment (line 12) without resuming the aborted move.
Note also that the midwife references the already demonstrated fetal shape for the explanation. She has only to add a description of the shape (i.e., “it curls up”) which facilitates the pregnant woman’s understanding of the locational relation between the buttocks and the feet; the description is accompanied by the sliding hand movement that depicts the “curled” shape on the end of which the feet are located. Thus, in lines 10–11 of the episode (see Excerpt 3), the midwife preemptively provides an explanation of why the location of the fetal feet has descended even though the location of the buttocks has ascended; she does this by showing the buttocks’ location relative to the fetal shape. This could be the answer to the question of why the midwife depicts the fetal shape instead of providing only an affirmative answer when responding to the pregnant woman’s request for confirmation of the location of the buttocks.
In the side sequence (lines 08–12), when the midwife produces the sliding hand movements on the abdomen accompanied by a deictic term koo ‘like this’ and the descriptions “it comes” and “it curls up,” the pregnant woman simultaneously sees and feels these actions as depictions of the fetal shape. In this sense, the pregnant woman’s perception is also multi-sensory. However, the multi-sensory perception is not as complex here as when the midwife mapped the three fetal body parts onto the abdomen by pressing the location of each; in lines 05 and 07, she allowed the pregnant woman not only to see and feel the midwife’s hand movements, but also to see and feel the midwife’s manipulations on her abdomen under the aspect of (the midwife’s) “feeling fetal body parts.” Thus, multi-sensory perception of the depicted fetal shape can be differently organized through various discursive and embodied practices in a manner appropriate to the status of the ongoing activity.
5. Conclusion
When the pregnant woman sees and feels the sliding movements of the midwife’s hands, she has a multi-sensory perception: she sees them with her eyes and feels them with the exterior skin of her abdomen, but she also has one unified perception of the movements on her abdomen. What I have demonstrated is that multi-sensory perceptions vary according to the status of the ongoing activity. In fact, the pregnant woman’s invited perception that was discussed in the analysis of the midwife’s practice of mapping fetal body parts onto the surface of the pregnant woman’s abdomen is more than simply multi-sensory. In other words, the pregnant woman may both see and feel that the midwife feels the fetal body parts with her fingertips.

In a technological environment, equipped with an ultrasound scanner, multi-sensory perception can be even more complex. Nishizaka (2010, 2011) observes that during prenatal ultrasound examinations, the pregnant woman’s perception of her uterine structures and fetal body parts at a particular position can be spatially distributed between the ultrasound monitor screen and her own body (see Figure 8). The doctor may point to a feature on the screen with their left index finger accompanied by a proximal deictic term, while touching a location of the abdomen with the transducer (emitting and receiving ultrasound waves) in their right hand. Thus, when looking at the screen, the pregnant woman has the “mixed” perception of one unified object, say, the fetal head at the touched position, both felt on the abdomen and seen on the screen.
This shows there are various types of complex multi-sensory perception that are organized differently in different activities. However, we still perceive things in such complex manners as directly as when we see the rigidity and fragility of glass. In the example that I have examined in this paper, such complex multi-sensory perception is mobilized as a resource for convincing demonstration.
The analysis in this paper is methodologically consequential. It is impossible, in principle, for the analyst to feel through video what participants in an interaction feel when they touch each other. However, I have demonstrated that the analyst can, through the detail of their interaction, observe what the participants see and feel. The analyst can see what the participants feel in the same way that a participant sees and feels what her co-participant sees and feels in the detail of the latter’s discursive and embodied practices in their interaction. Multi-modal perception is available to the analyst as an important analytic resource. Through seeing what the participants see and feel, the analyst can obtain knowledge of it. Of course, knowledge obtained in this way is inevitably subject to error. However, one should remember that all knowledge is inevitably defeasible and subject to doubt (Coulter, 1979; Wittgenstein, 1953, 1969; see also Yamada, 2016). Thus, the demonstration of multi-modal perception in interaction also demonstrates the availability of multi-modal perception for the analysis of interaction.
References
Atkinson, J. M. (1984). Our masters’ voices: The language and body language of politics. London: Methuen.
Cekaite, A. (2015). Coordination of talk and touch in adults’ directives to children: Touch and social control. Research on Language and Social Interaction, 48(2), 152–175.
Cekaite, A. (2016). Touch as social control: Haptic organization of attention in adult-child interactions. Journal of Pragmatics, 92, 30–42.
Cekaite, A. & Kvist, M. H. (2017). The comforting touch: Tactile intimacy and talk in managing children’s distress. Research on Language and Social Interaction, 50(2), 109–127.
Coulter, J. (1979). The social construction of mind: Studies in ethnomethodology and linguistic philosophy. London: Macmillan.
Coulter, J. (1994). Is contextualisation necessarily interpretive? Journal of Pragmatics, 21, 689–698.
Goodwin, C. (1994). Professional vision. American Anthropologist, 96(3), 606-633.
Goodwin, C. (1996). Transparent vision. In E. Ochs, E. A. Schegloff & S. Thompson (Eds.), Interaction and grammar (pp. 370-404). Cambridge: Cambridge University Press.
Goodwin, C., & Goodwin, M. H. (1996). Seeing as situated activity: Formulating planes. In D. Middleton & Y. Engeström (Eds.), Cognition and communication at work (pp. 61-95). Cambridge: Cambridge University Press.
Goodwin, M. H. (2017). Haptic sociality: The embodied interactive construction of intimacy through touch. In Meyer, C., Streeck, J. & Jordan, S. J. (Eds.), Intercorporeality: Emerging socialities in interaction. Oxford: Oxford University Press.
Goodwin, M. H. & Cekaite, A. (2018). Embodied family choreography: Practices of control, care and mundane creativity. London: Routledge.
Husserl, E. (1973). Ding und Raum. Husserliana Band XVI (pp. 1-293). The Hague: Nijhoff.
Jefferson, G. (1972). Side sequences. D. N. Sudnow (Ed.), Studies in social interaction (pp. 294-33). New York, NY: Free Press.
Jefferson, G. (1990). List construction as a task and interactional resource. In G. Psathas (Ed.), Interaction Competence (pp. 63-92). London and Washington: University Press of American.
Jefferson, G. (2004). Glossary of transcript symbols with an introduction. In G. H. Lerner (Ed.), Conversation analysis (pp. 13–23). Amsterdam: John Benjamins.
Lindwall, O., & Ekström, A. (2012). Instruction-in-interaction: A teaching and learning of a manual skill. Human Studies, 35(1), 27–49.
Maynard, S. K. (1994). An introduction to Japanese grammar and communication strategies. Tokyo: The Japan Times.
Merleau-Ponty, M. (2012 [1945]). Phenomenology of perception. Translated by Donald A. Landes. New York: Routledge.
Mori, J. (2014). The re-examination of so-called ‘clefts’: A study of multiunit turns in Japanese talk-in-interaction. In K. Kabata & T. Ono (Eds.), Usage-based approaches to Japanese grammar: Towards the understanding of human language (pp. 193–222). Amsterdam: John Benjamins.
Nishizaka, A. (2007). Hand touching hand: Referential practice at a Japanese midwife house. Human Studies, 30(3), 199–217.
Nishizaka, A. (2010). Self-initiated problem presentation in prenatal checkups: Its placement and construction. Research on Language and Social Interaction, 43(3), 283–313.
Nishizaka, A. (2011). The embodied organization of a real-time fetus: The visible and the invisible in prenatal ultrasound examinations. Social Studies of Science, 41(3), 309–336.
Nishizaka, A. (2016). Syntactical constructions and tactile orientations: Procedural utterances and procedures in massage therapy. Journal of Pragmatics, 98, 18–35.
Nishizaka, A. (2017). The perceived body and embodied vision in interaction. Mind, Culture, and Activity, 24(2), 110–128.
Nietzsche, F. (2006 [1887]). On the genealogy of morals. Translated by Carol Diethe. Cambridge, UK: Cambridge University Press.
Sacks, H. (1992). Lectures on conversation. Oxford: Blackwell.
Sacks, H., Schegloff, E. A., & Jefferson, G. (1974). A simplest systematics for the organization of turn taking for conversation. Language, 50(4), 696-735.
Schegloff, E. A. (1980). Preliminaries to preliminaries: “Can I ask you a question?”. Sociological inquiry, 50(3‐4), 104-152.
Schegloff, E. A. (2007). Sequence organization in interaction: A primer in conversation analysis. Cambridge: Cambridge University Press.
Sugiyama, Y. (2001). Obstetrics (7th ed.). Kyoto: Kinpodo.
Terasaki, A. K. (2004.) Pre-announcement sequences in conversation. G. H. Lerner (Ed.), Conversation analysis: Studies from the first generation (172–223). Amsterdam: John Benjamins.
Wittgenstein, L. (1953). Philosophical investigations. Oxford: Blackwell.
Wittgenstein, L. (1969). On certainty. Oxford: Blackwell.
Yamada, K. (2016). What is Wittgenstein’s view of knowledge?: An analysis of the context dependency of knowledge. Studies on Humanities and Social Sciences of Chiba University, 33, 19–26.
Appendix: Transcript Conventions
In all the excerpts, each line is composed of two or three tiers. There is first a Romanized version of the original Japanese. Below this are phrase-by-phrase glosses where necessary. Finally, the third tier presents an approximate English translation. The first tier of the transcript utilizes Jefferson’s (2004) transcription system. In the second-tier glosses, the following abbreviations are used: ITR for “Interrogative”; JD for “Judgmental”; and PRT for “Particle.” Some excerpts include annotations of the embodied conduct of each participant in the extra tiers designated as “PWM” and “MDW.” The starting and ending points of the movements are indicated by the sign “|”. Double arrows (“-->>”) in these tiers indicate continuation of the described conduct over the line.
1 In Japan, qualified midwifes are entitled to practice independently under the supervision of a qualified obstetrician.
2 My attention was drawn to these sentences by Elwys De Stefani, and Ana Cristina Ostermann’s panel proposal for the 2019 International Institute for Ethnomethodology and Conversation Analysis conference.
3 Matt Burdelski, an editor of this special issue, noted that what follows the phrase katachi ga ‘the shape is’ appears to form a three-part list, which Jefferson (1990) observed in ordinary conversation (see also Atkinson, 1984, for three-part lists in another setting). However, note that the three fetal body parts pointed out by the midwife are usually identified as major body parts in contrast to other small body parts, such as the feet and hands (see Sugiyama, 2001). The midwife most likely uses them to show the fetal shape; however, it may not be accidental that the number of those major body parts is three.
4 It might appear that the incipient sentence construction (katachi ga ‘the shape is’) is aborted to respond to the pregnant woman’s overlapping question (line 04). However, the following points should be noted. Firstly, the midwife proceeds to show the shape after the noun phrase. (If she answered the pregnant woman’s question, she would instead have directly shown the foot.) Secondly, there is no prosodic disjunction when proceeding to referring to fetal body parts. Finally, and most importantly, the referential act in line 05 becomes incipient during the utterance of katachi ga; while uttering the noun phrase, the midwife puts her hands on the location of the head.
5 The Japanese language has its unique system of deictic terms consisting of three types: ko-, so- and a-types. Ko-type deictic terms refer to something proximal to the speaker, so-type terms to something proximal to the recipient, and a-type terms to something distal but accessible to both speaker and recipient (see Maynard, 1994, p. 28). They all have pronouns and locative nouns (though I gloss the ko-type locative noun as the adverb here in the text). The following table presents a simplified summary:
| ko- | so- | a- | |
|---|---|---|---|
| Pronouns | kore | sore | are |
| Locative nouns | koko | soko | asoko |
However, the point is the difference between pronouns and locative nouns. On one hand, referring to a location of an object with a locative noun does not imply the speaker’s perceptual access to the object (in addition to the location); the speaker only has to know that the object is there. On the other hand, referring to the object with a pronoun implies the speaker’s perceptual access to the object (together with the location of the object), and the speaker presumes that the recipient also has access to it.
6 In line 09, the midwife may have touched an incorrect location. Then (in line 10), she may have indicated that she realizes this via the utterance of the stressed token a ‘oh’ and proceeded to locate the correct location by pressing it.