 Social Interaction.
Video-Based Studies of Human Sociality.
Social Interaction.
Video-Based Studies of Human Sociality.
2018 VOL. 1, Issue 2
ISBN: 2446-3620
DOI: 10.7146/si.v1i2.110019
Social Interaction
Video-Based Studies of Human Sociality
A preference for non-invasive touch in caregiving contexts
Ann Katrine Marstrand, University of Southern Denmark
Jan Svennevig, University of Oslo
This article analyses how a professional caregiver uses touch as a key resource when instructing and guiding a person with Parkinson’s disease. Touch is shown to have both facilitating and controlling functions in the accomplishment of everyday tasks in residential care. We find an orientation to touch as a sensitive action, invading the patient’s intimacy and right to self-determination. First, the semiotic resources occur in a successive order, where touch often occurs only when a verbal or gestural action has failed. Second, less invasive kinds of touch, such as patting, precede more invasive kinds, such as holding and shoving.
Keywords: Dementia; Instruction; Parkinson’s disease; Professional care; Touch
1. Introduction
In residential care homes in Denmark, residents frequently have cognitive and physical impairments of various kinds, including neurodegenerative diseases such as dementia and Parkinson’s disease. These impairments can make it difficult for the residents to perform mundane activities by themselves, for example showering, putting on clothes, and brushing their teeth. To overcome such challenges, professional caregivers routinely engage in bodywork (Kelly, 2014) to help and instruct residents with tasks in their everyday lives. These instructions involve a variety of different semiotic resources (Goodwin, 2013) including talk, gaze, gestures, bodily positioning and touch. Using a conversation-analytic approach, we consider instructions and instructed actions during a task in which a resident with Parkinson’s disease needs to sit down on a sofa in the common area. Two specific impairments inflicted by this disease are slowness of bodily movement and dementia. In particular, we describe how touch is used as a key semiotic resource to instruct and guide the accomplishment of the embodied actions.
The most prominent problems for people with Parkinson’s disease include resting tremor, inability to initiate movement of body parts (akinesia), slowness of movement (bradykinesia), rigidity, and postural instability (Reilly, Rodriguez, Lamy, & Neils-Strunjas, 2010). Some people with Parkinson’s disease, such as the resident studied here, also experience dementia symptoms. Previous studies of Parkinson’s disease and interaction are largely experimental and the research field would benefit from a shift in focus from individual impairment towards collaborative competencies (Griffiths, Barnes, Britten, & Wilkinson, 2011).
People living with a dementia diagnosis experience memory loss, language difficulties, and functional decline, among other symptoms (Budson & Kowall, 2011) with different severities relating to the stage and type of dementia (see Kindell, Keady, Sage, & Wilkinson [2017] for a review of conversation-analytic studies of interaction involving different kinds of dementia). These difficulties progress and may influence the ability to independently carry out everyday tasks. Many people with dementia therefore move into residential care homes in the later stages of dementia to receive professional care in order to deal with their challenges.
Few naturalistic studies have been carried out with a conversation analytical perspective within the field of professional dementia care. This study sets out to explore practices of everyday care tasks in a residential care home. An interactional approach, such as ours, does not focus uniquely on the caregiver or the patient, but studies caregiving as collaborative action. We believe that such an approach has greater potential for identifying collaborative solutions to recurring challenges and thus for better supporting caregivers and benefitting elderly residents.
A limited number of conversation analytic studies have focused on care work. For instance, Jansson and Plejert (2014) study the activity of showering and focus on the dilemma faced by professional caregivers when residents with dementia show resistance to the activity. The authors find that a delicate negotiation may allow care recipients to maintain some sense of independence and dignity. Specifically, Jansson and Plejert highlight that the showering progresses more smoothly when the resident’s concerns are taken into account and aligned with. In addition, Heinemann (2009) finds that attention to each other’s needs in the caregiving situation is essential, observing for instance that humour before a diaper change minimizes conflict during the caregiving task.
Despite the very embodied care work analysed in studies such as these, none have topicalized the use of touch. Rather, relevant studies on this topic are found in the context of family interaction or pedagogical activities involving children and adults. In these contexts, touch has been investigated in terms of intimacy (Goodwin, 2015) and control (Cekaite, 2016). The researchers find that touch is used by parents and teachers as a way of directing and taking control of the child’s body, also when the child resists doing an instructed action. Directing via touch is also used in combination with other resources, such as syntactic, prosodic and embodied resources, during directive sequences in family interactions between parents and their children. Cekaite (2015) finds that multimodal directives involving touch are preceded by a pure verbal directive that allows the child to respond to this directive before the adult turns to using touch in order to achieve compliance. Touch can also constitute an interactional resource that makes a specific body part relevant (Nishizaka, 2007) and be included in negotiations of understanding (Nishizaka, 2011). As such, understanding is not limited to modalities that address the eyes and ears.
However, touch during instructions in professional caregiving may represent a slightly different phenomenon, since it is not merely a question of the recipient’s compliance but also of their capability to move. In professional interactions such as physical examinations (Heath, 1986), touch is often something accountable and has the potential to cross the boundary of intimacy in the relationship between the conversation partners. Denman and Wilkinson (2011) study a male care recipient with a traumatic brain injury who touches a female caregiver (for instance, placing his hand on the caregiver’s hand or wrist) during conversation. They find that the touches are oriented to as inappropriate behavior by the caregiver.
Given that touch constitutes such a common phenomenon in caregiving, it is surprising how little is known about it, at least from an interactional perspective. Thus, in this study, we investigate how instructing and guiding physical action is carried out through different modalities in care work. More specifically, we ask how haptic actions are implicated in instructions, and how the participants orient to the potential sensitivity of touch.
2. Method and data
The data for this study are video recordings from a Danish residential care home for people with dementia collected by the first author. The transcripts are in Danish with English translations and accompanied by anonymized screenshots from the video recording.
The participants in the activity studied are Erik, a person with Parkinson’s disease, and Maya, a professional caregiver. We will analyse one interaction, which takes place in the common room of the residential care home. The three excerpts are part of a two-minute-long activity and successively follow the original order of the excerpts. We will show how the steps of these instructions function as a unit in which the task is finally collaboratively accomplished and the resident sits down on the sofa. The caregiver, the resident, and the resident’s spouse had all given their consent for the data collection prior to the video recordings.
Our analysis builds on conversation analysis (CA) to approach the video recordings and transcribe them in considerable detail according to Jefferson’s (2004) standards. Additionally, we present anonymized stills that sequentially relate to the words in the written transcripts emphasized in bold. CA has been applied to a range of communication disorders (Wilkinson, 2013) and institutional settings (Antaki, 2011) and also investigates both verbal actions and non-verbal actions such as gaze (Goodwin, 1980), bodily movements (Mondada, 2016), and the use of objects in interaction (Goodwin, 2010).
3. Analysis
In this section, we will analyse three excerpts that illustrate how haptic actions are implicated in instructing and guiding Erik’s physical movements, and how they are related to verbal and gestural actions. Excerpt (1) involves the initiation of a new action (holding onto the sofa) and shows how problems carrying it out are dealt with. Excerpt (2) shows how touch is used to stop and correct an inappropriate action, and Excerpt (3) demonstrates how touch is involved in supporting an ongoing action initiated by Erik.
3.1 Using touch to initiate action
Excerpt (1) shows how talk, gestures and touch are used in instructions to initiate action, in this case to hold on to the sofa as a part of the more complex project of sitting down. Prior to the excerpt, Erik has been sitting on the sofa in the common area of the residential care home watching a football match. After a visit to the lavatory, he is now walking back, supported by his rollator and Maya, a professional caregiver. Just before Excerpt (1), Erik has made a right turn around the sofa under Maya’s instruction and they are now standing on the left-hand side of the sofa.
Excerpt (1): Just grab the sofa
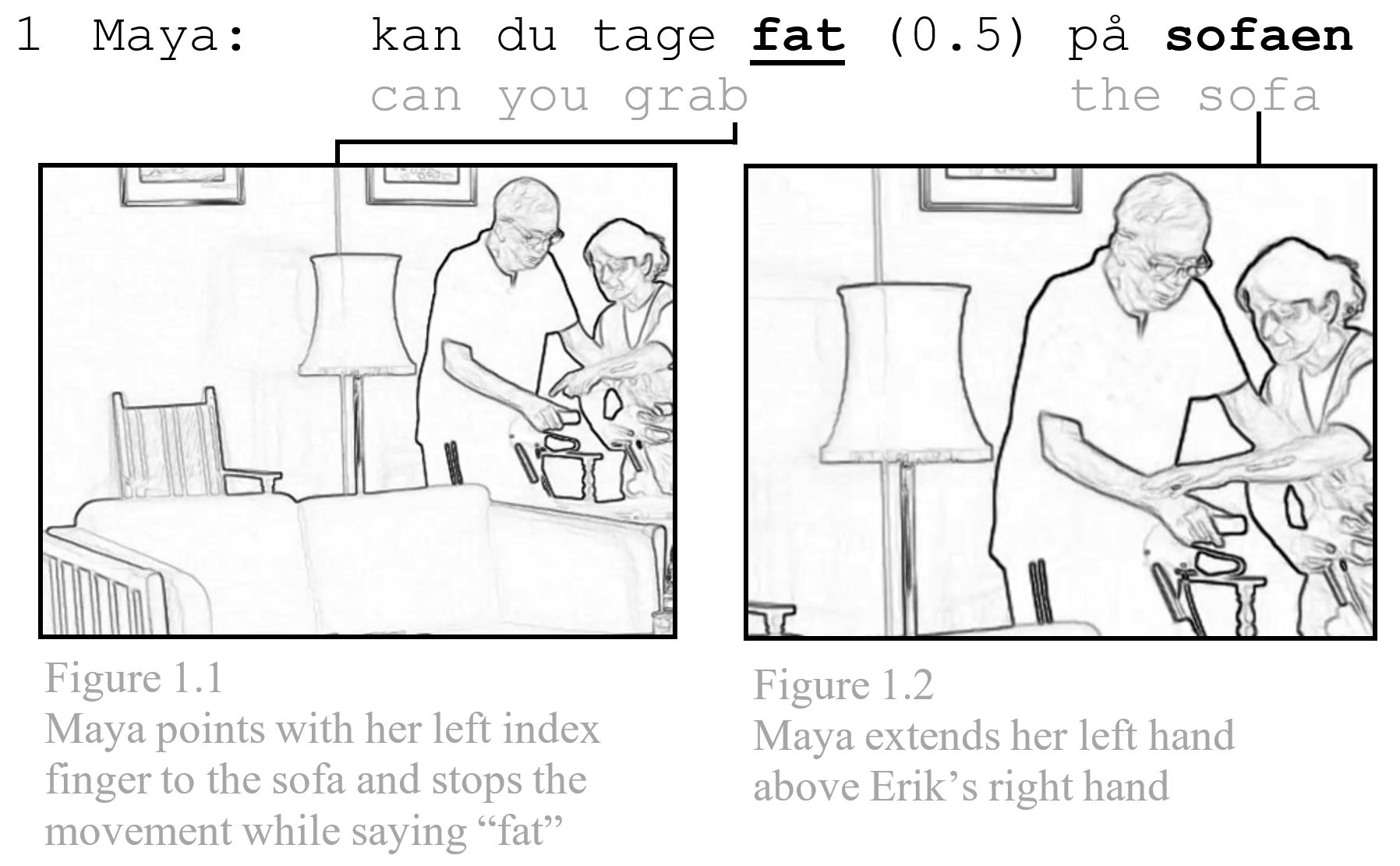
In Excerpt (1), Maya uses several semiotic resources and combinations of different resources (Goodwin, 2013) during her instruction of Erik’s movements. Maya’s first attempt combines a verbal request with a deictic pointing gesture (Goodwin, 2003). The verbal component specifies the action to be performed, while the gestural component indicates the endpoint of the movement required. The multimodal specialization of the two modes allows the speaker to indicate these two things simultaneously, even before she completes the verbal instruction by locating the endpoint (“sofaen” [the sofa]). Maya’s instruction takes the form of an interrogative with a modal auxiliary (“kan du” [can you]), which may be considered in this case to take into consideration the contingencies associated with carrying out the task in question, namely his potential problems of movement. Requests that are in the joint interest of both participants are otherwise regularly formulated as imperatives (Antaki & Kent, 2012; Zinken & Ogiermann, 2013).
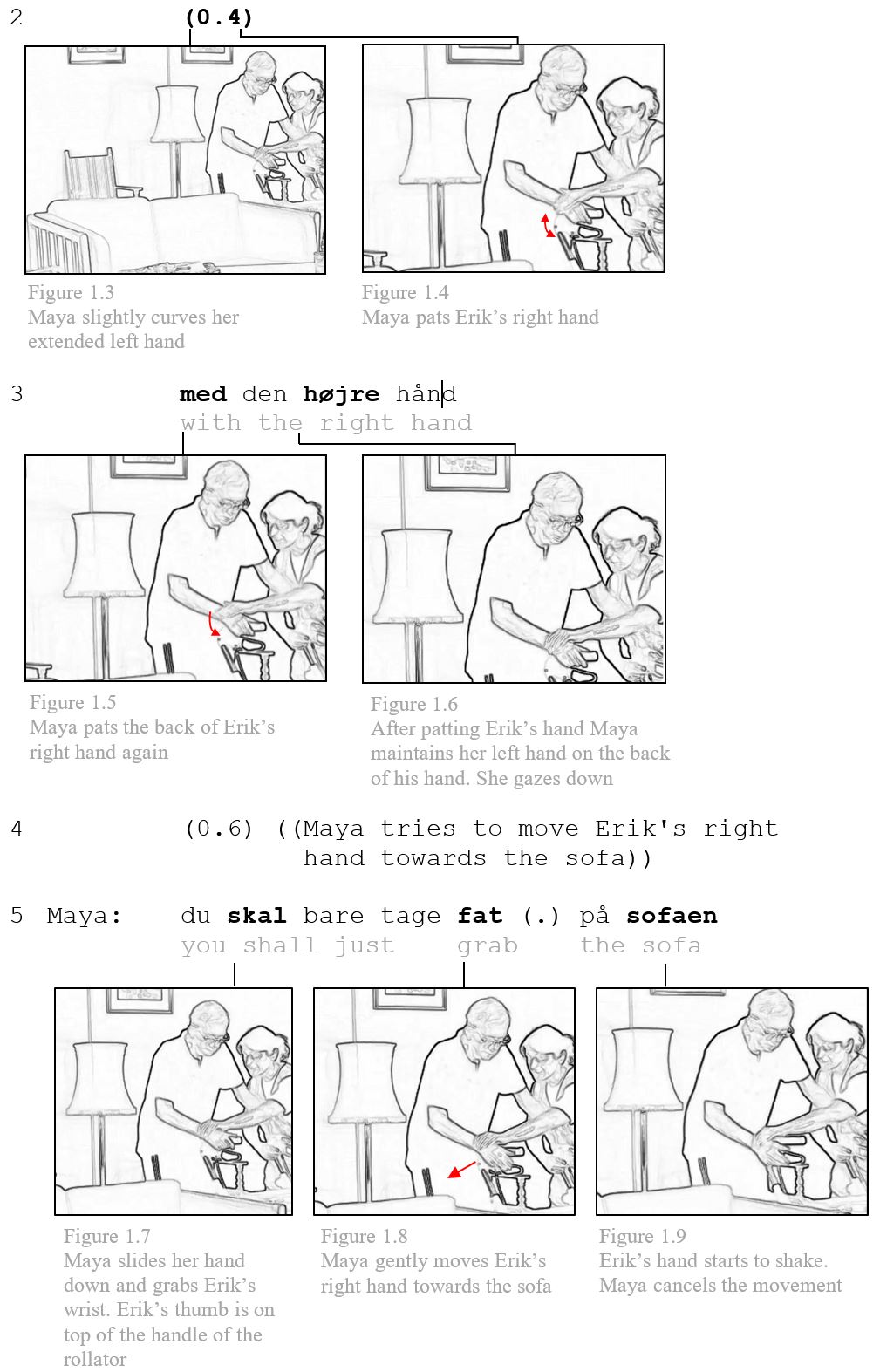
Maya’s request is the first-pair part of an adjacency pair that makes a second-pair part from Erik conditionally relevant (Schegloff & Sacks, 1973). However, Erik does not immediately perform the instructed action and does not respond verbally to the request either. During the ensuing silence (line 2), Maya prompts Erik to take action by engaging another resource, touch. She curves her hand above Erik’s right hand (Figure 1.3) and then briefly pats it (Figure 1.4). When she still does not receive any response from Erik, Maya makes the second pat in line 3 (Figure 1.5) but this time she keeps her left hand on the back of his right hand, thus increasing the duration and intensity of the tactile prompt (Figure 1.6). Simultaneously, she adds a verbal specification of the instrument of the action (“med den højre hånd” [with the right hand]). This specification is an increment to the preceding turn (Schegloff, 1996; Ford, Fox, & Thompson 2002) and as such constitutes a recompletion of it. This is a practice regularly used for pursuing a response (Pomerantz, 1984). While uttering “højre” [right], Maya shifts her gaze downwards to their hands, further directing their joint attention to the body part in question.
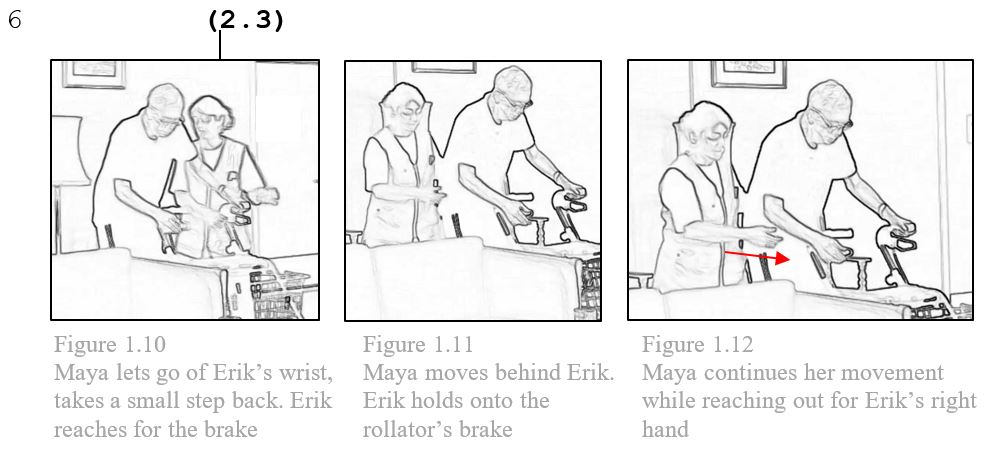
Still receiving no response from Erik, Maya takes hold of Erik’s hand to further increase the intensity of the tactile prompt and moves it towards the sofa (Figures 1.7–1.9). This action is also accompanied by a renewed verbal instruction, this time in form of a declarative with the modal auxiliary “skal” [shall], which increases the deontic strength of the request compared to the first formulation. Whereas the first request took the form of an interrogative that made relevant a response in the form of acceptance or rejection, this statement takes compliance for granted and merely instructs the interlocutor what to do. Eventually, Maya cancels the movement in Figure 1.9 as Erik’s right hand exhibits tremor. Subsequently, she abandons the project of getting him to hold on to the sofa and instead initiates another, making him move forward.
What we can observe in this excerpt is that the instruction is produced in a multimodally rich manner. First, the endpoint of the movement is indicated by both verbal and gestural means. Thus, the meaning of the two resources is mutually constituted; what the caregiver’s gesture is pointing to is elaborated through the talk, while the pointing gesture indicates which part of the sofa is addressed. Second, the instrument of the action is indicated by both verbal and tactile means. Third, the instruction is reformulated, this time accompanied by physical manipulation of the interlocutor’s hand. We may thus say that several aspects of the instruction are mediated by several modalities simultaneously, reduplicating the acts of reference and thereby making them more salient. Maya’s tactile prompts are related to Erik’s lack of responsiveness and construe the source of trouble as a problem with moving the hand (rather than, for example, Erik’s willingness to comply with the request). As such, the caretaker seems to orient to problems potentially caused by the Parkinson’s disease, namely akinesia (inability to initiate movement). In this way, the problems in this context differ from those in the child-adult interactions studied by Cekaite (2011, 2015, 2016) in that they are related not to lack of willingness but lack of ability. Nevertheless, the caregiver’s solution to the problem is the same as that of the adults in Cekaite’s studies.
The embodied actions are also ordered, from pointing to tapping to shoving/pushing. This order seems to reflect a scale of invasiveness and dominance of the action, i.e. touching is more invasive than gesturing. Physical manipulation of a body part is even more invasive, as it potentially challenges the other’s right to self-determination, their control of their own body, in a very concrete sense (Cekaite, 2015). The ordering of these embodied actions may thus give rise to a hypothesis that there is a preference for gesturing over touching, and touching over manipulation of body parts, in instructing others on how to perform bodily movement.
3.2 Using touch to stop and correct actions
Excerpt (2) exemplifies how touch can be used for other purposes than initiating an action. Here the caregiver instructs the resident to stop advancing and to move sideways towards the sofa. She begins by expressing the instruction through gesture and talk. When the resident does not perform the instructed action, she turns to touch and bodily repositioning to prompt an embodied action.
Excerpt (2): You stay
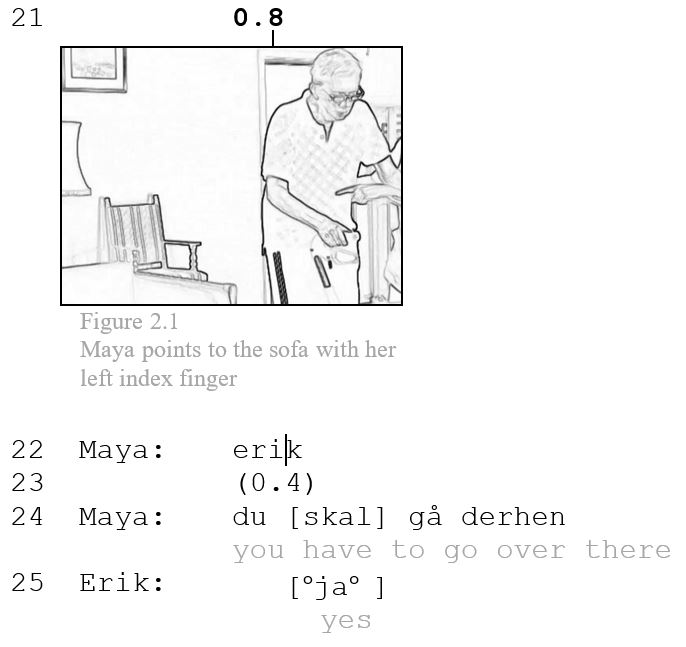
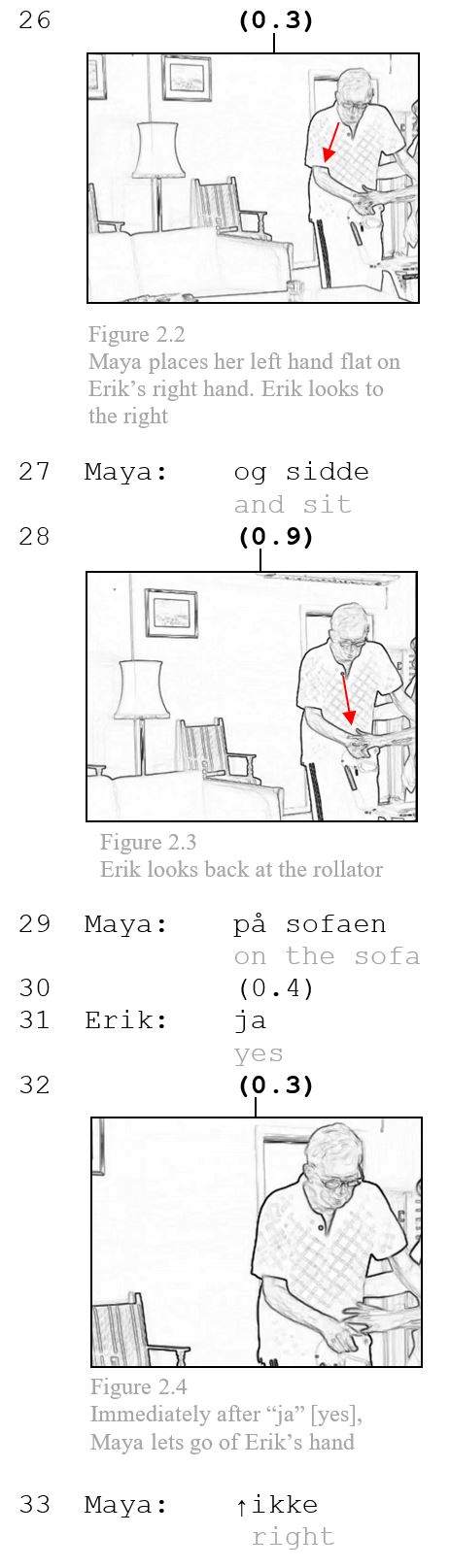

The first attempt to guide the resident uses a combination of verbal and gestural means. Maya points to the sofa (line 21) and addresses Erik by his first name (line 22). The summons is a way of establishing joint attention, and as such may indicate a problem with Erik’s ongoing embodied actions (his moving forward) not being in line with their common project. With her gesture, Maya directs his attention to the sofa and thereby projects the next relevant action. Erik responds with some delay to the summons (line 25), and Maya treats the lack of a response in line 23 as possibly indicating a problem of understanding or attending to their previously established project. She specifies her instruction verbally; using a declarative with the strong deontic modal verb “skal” [shall] (line 24). This strong expression of obligation reflects (and co-constitutes) the established joint commitment to the project (Rossi, 2012).
As there is no immediate reaction from Erik, Maya places her hand on his right hand (Figure 2.2). She keeps her hand there for around 4 seconds (see also Figure 2.3). Such sustained touch has been shown to be used in parent-child interaction to reorient a child from inattentiveness or inappropriate actions to displaying attention to the activity in process (Cekaite, 2016). This further underlines Maya’s actions as prompting an embodied reaction from Erik. In addition, the touch may be performed in order to stimulate Erik’s tactile perception of the direction of the movement to be made (and thus may be related to Erik’s akinesia). This explanation is supported by the fact that she has to stretch over and thus make an extra effort to touch Erik’s right hand (rather than his left). Further evidence that Maya is pursuing an embodied response is that she recompletes the verbal utterance twice (lines 27 and 29); adding two increments that further specify the instruction. After the first recompletion, there is a slight embodied reaction in that Erik starts to look towards the sofa, and after the second, he also produces a verbal response in the form of an acknowledgement token (line 31). At this point, we can thus observe the first signs of him orienting to the project.
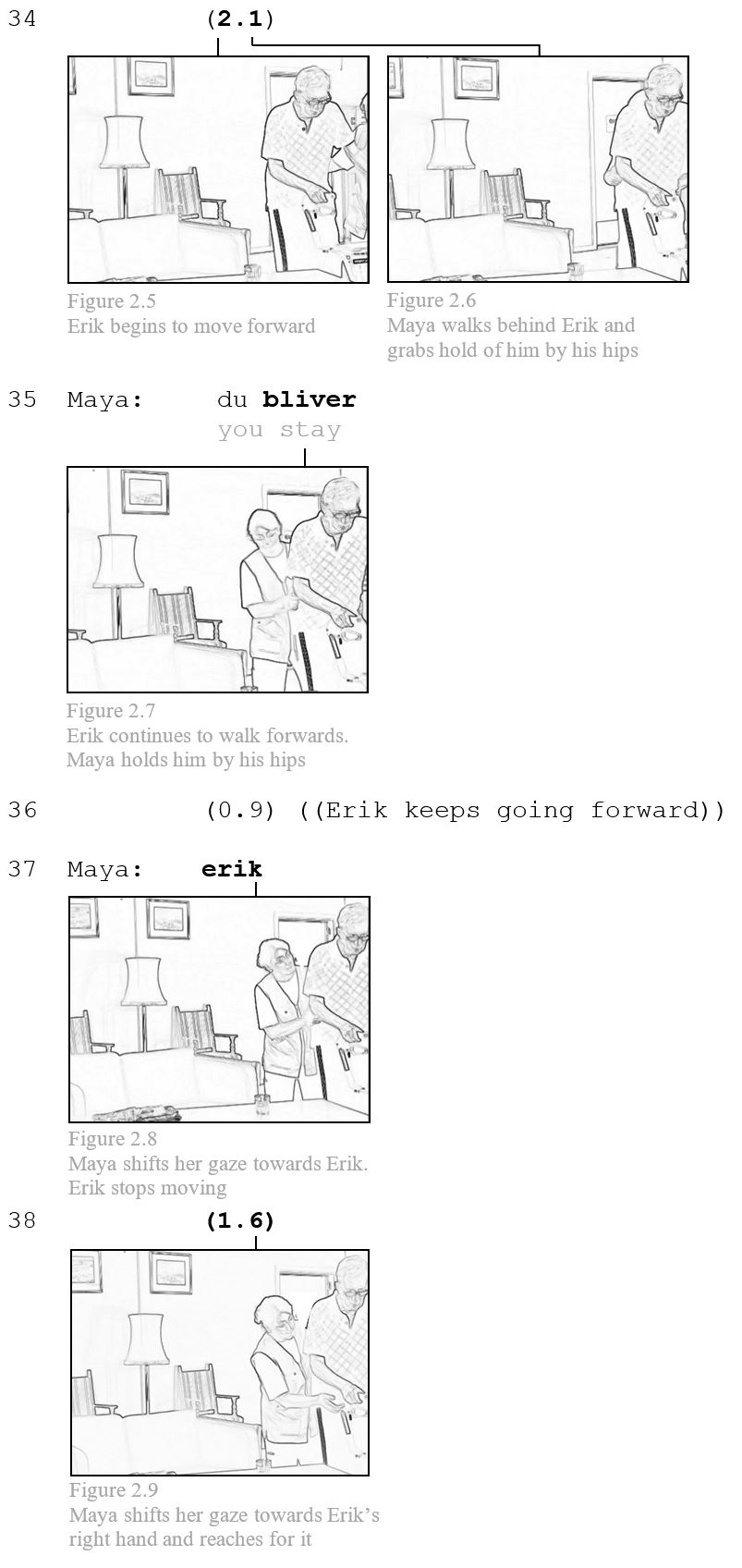
Maya also seems to take these actions as indications that her instruction is now being attended to in that she withdraws her hand (Figure 2.4). However, instead of moving towards the sofa, Erik reinitiates his movement forward (Figure 2.5). Maya reacts to this movement as an inappropriate action by moving around him, taking hold of his hips and issuing the strong, almost order-like, verbal directive “du bliver” [you stay] (line 35). She thereby positions herself in a control-formation, giving her embodied affordances to control and steer the recipient’s locomotion, and carries out a haptic control action of stopping his movement (Cekaite, 2010, 2015). Both the embodied and the verbal actions thus display a strong deontic stance. This can be considered an embodied correction of an action that is treated as not contributing to the progress of the joint activity at hand (Keevallik, 2010). By grabbing someone by their hips, one has almost full control over the other person’s bodily movements and this could potentially be problematic (Denman & Wilkinson, 2011). Nevertheless, Eric does not react to the embodied action as in any way inappropriate in this specific context. On the contrary, he continues forward until Maya further prompts him to react by producing a new summons, “Erik” (line 37).
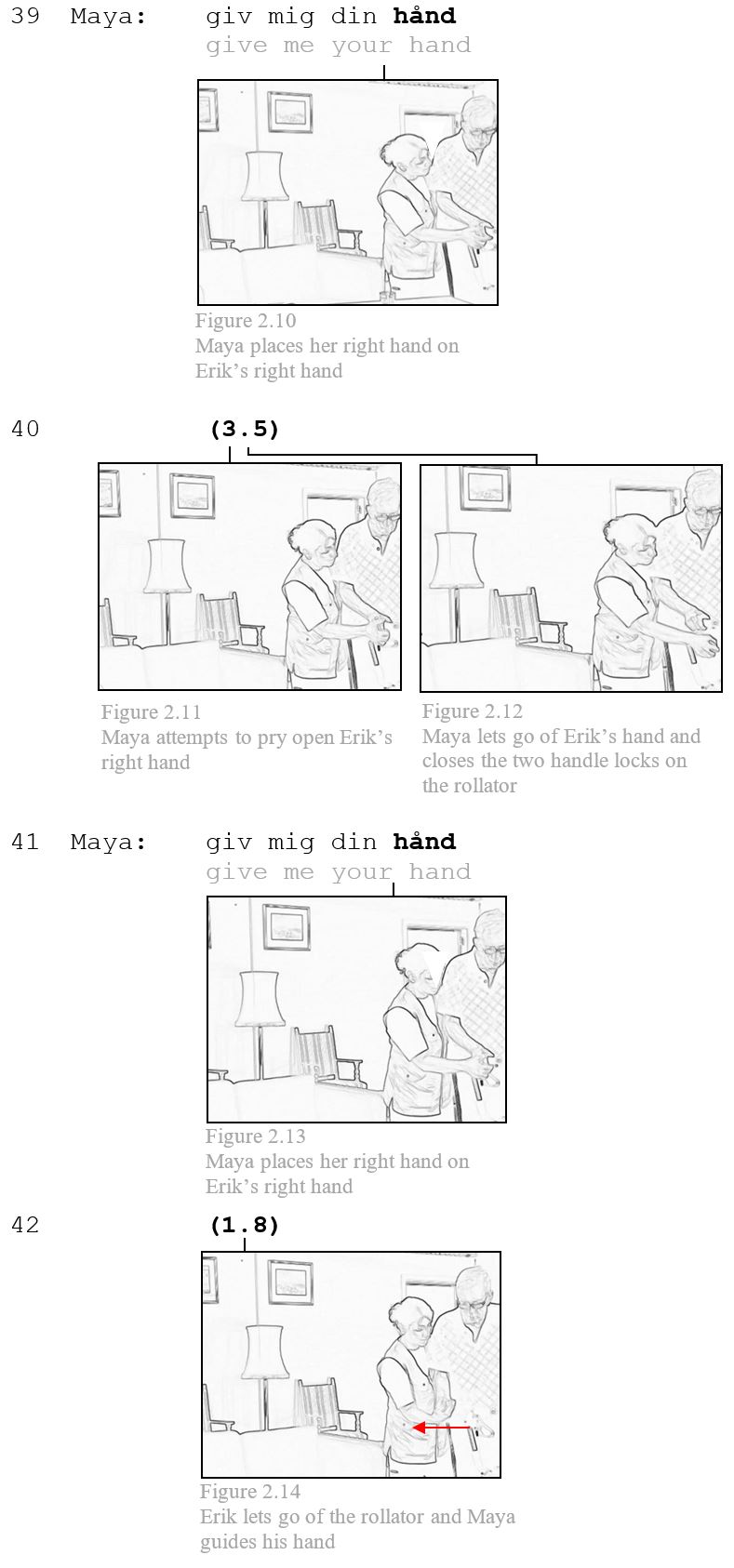
Maya looks at and reaches for Erik’s right hand and thus makes it relevant in the interaction (Figure 2.9). Next, she verbally instructs Erik with an imperative, “giv mig din hånd” [give me your hand], and finally she places her hand on Erik’s hand (Figure 2.10). Again, Maya begins her instruction by using gaze, gesture and talk and then she finally makes use of touch. Subsequently, she attempts to pry open Erik’s hand (Figure 2.11) but interrupts her action in order to close the rollator’s two handle locks (Figure 2.12). Maya makes a new attempt to request Erik’s hand by using talk (line 41) and then touch (Figure 2.13). Finally, Erik lets go of the rollator (Figure 2.14) and Maya acknowledges the action with a high-grade evaluation (Jansson, 2016). After this Excerpt (2), Erik and Maya start moving towards the sofa.
We can observe two different ways in which Maya orients to touch in this excerpt. When she prompts Eric to initiate an action, she uses touch only when a verbal and gestural instruction has failed. But when she prompts him to terminate an action, she uses touch in the first attempt, even a rather controlling and invasive haptic action. This may indicate that in cases of correcting inappropriate actions, the preference for non-invasive actions is overridden by the preference for progressivity (of the joint activity in course) (Stivers & Robinson, 2006).
3.3 Using touch to support an ongoing action
Excerpt (1) has focused on how touch is used to initiate a bodily action and Excerpt (2) on how it is used to stop and reorient an action. In the last excerpt, we will show how touch and talk are used to guide an ongoing action as it progresses. Fifteen lines are omitted between Excerpt (2) and (3). Maya and Erik are now walking towards the front of the sofa. We show how they collaborate in turning Erik around so that he has his back towards the sofa, thus taking the position required for sitting down.
Excerpt (3): Touch and turn
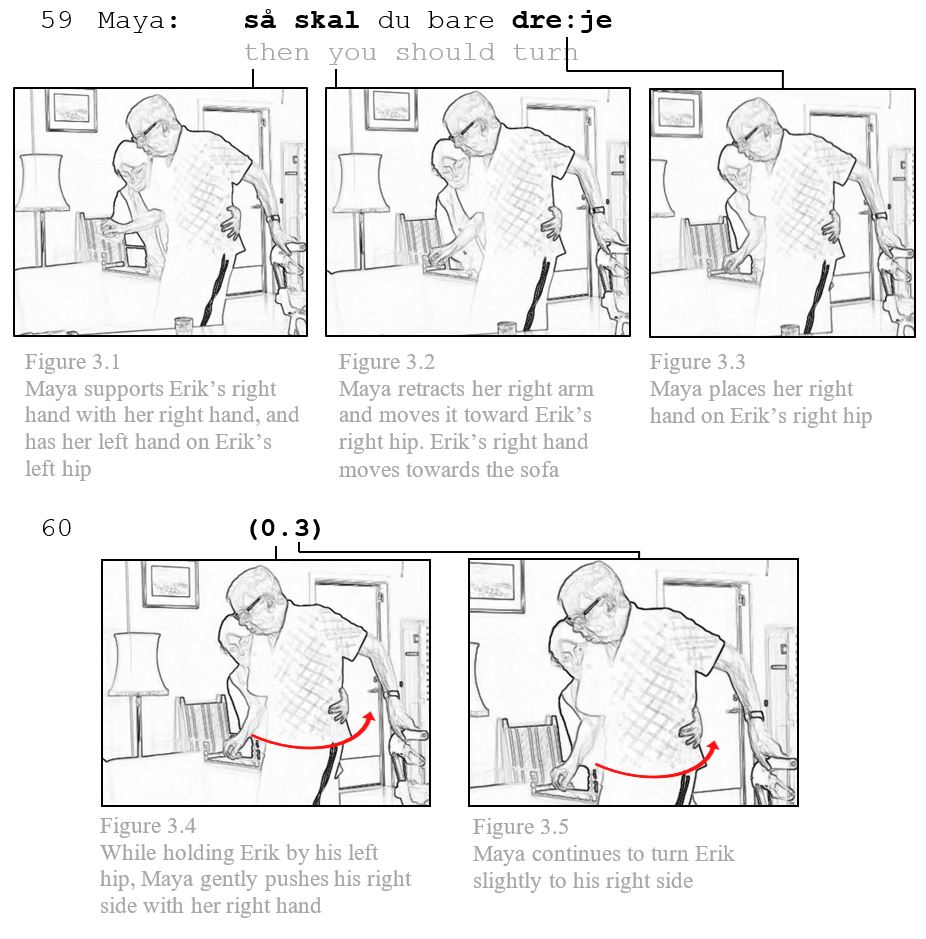
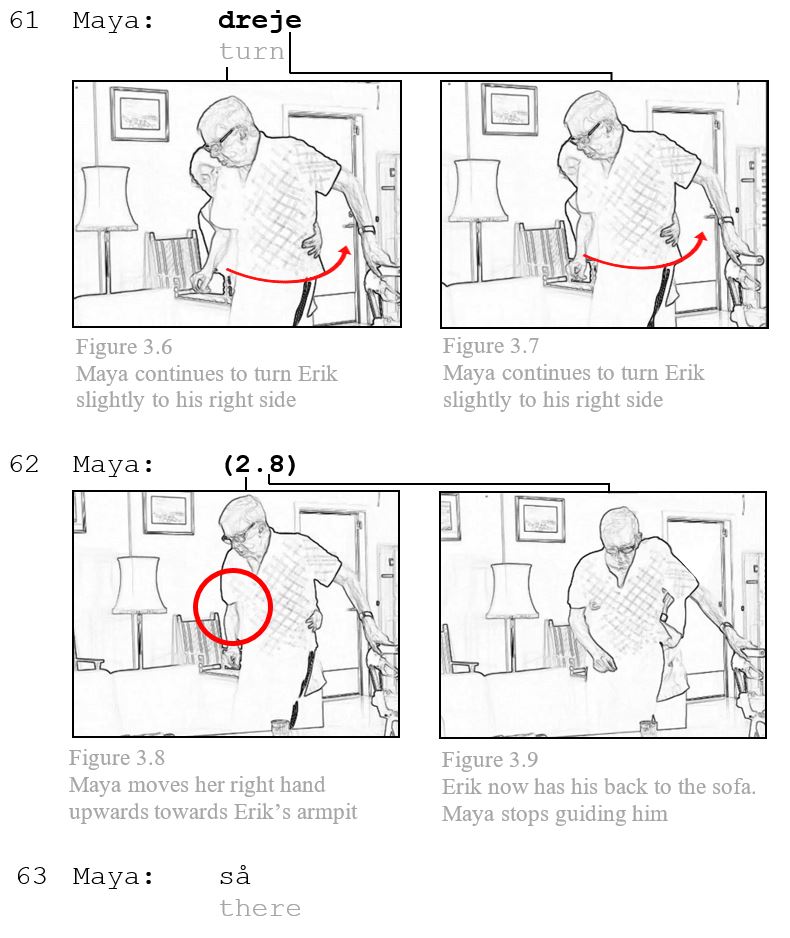
Walking towards the sofa, Maya already has her left hand on Erik’s hip. In line 59, she gives a verbal instruction while moving her right hand to the other hip (Figures 3.1–3.3). The verbal and haptic actions thus occur in a more simultaneous and coordinated mode, rather than in succession as above. The strong deontic form of the verbal instruction (“skal” [shall]) shows a continued orientation to the project as a joint commitment. By placing her hands on his hips, Maya maximizes her control over Erik’s bodily movements in turning around. Both verbally and haptically, she thus takes a very dominant position. However, in contrast to Excerpt (2), where Maya takes hold of Erik’s hips to stop an inappropriate action (thus opposing Erik’s action), here it occurs in concert with Erik’s own attempts to turn around, namely by moving his feet. As such, it may be considered as facilitating and supporting an embodied action already in course. The prolongation of the vowel (“dre:je” [turn]) and the repetition in line 61 serve to mark the progressive unfolding of the movement and the relevance of continuing (Figures 3.4–3.9). The end of the turning trajectory is signalled by the boundary marker “så” [there you go] (Heinemann & Lindstöm, 2007). The verbal utterances thus mainly serve an accompanying function of timing and encouraging the ongoing embodied action. However, they also serve as referents of the requested embodied action in progress.
In this excerpt, Erik and Maya seem very tuned in to each other and their common project. As a consequence, Maya’s instructions are kept to a minimum. Through the use of talk and touch together, Maya instructs Erik in the ongoing action and Erik performs the instructed action in close collaboration with her. Maya’s touch of Erik’s hips can be seen as facilitating the ongoing activity. Rather than initiating or stopping a course of action, touch is used here to guide and support an embodied action already in progress. This may explain the early (initial) use of this invasive haptic action. Erik’s displayed commitment to the activity in progress – combined with his displayed problems carrying it through on his own – provides the legitimacy for giving priority to the preference for progressivity over the preference for non-invasiveness.
4. Concluding discussion
In this study, we have described how a professional caregiver uses touch as a semiotic resource during instructions to a resident with Parkinson’s disease. She uses touch to a) initiate an action; b) carry through an action in course; and c) stop an action. In this way, the caregiver treats touch as an interactional resource to facilitate and promote an instructed action. As such, touch constitutes an integral part of the instructions during a caregiving activity involving potential and manifest problems of movement and possibly also of memory and understanding. In contrast to the findings of Denman and Wilkinson (2011), it seems unproblematic for the male resident that the female caregiver touches him during this task. Touch is not verbally topicalized or marked as inappropriate by embodied means at any point in the interaction.
The resident demonstrably has difficulties carrying out the verbal and embodied instructions. Therefore, the caregiver pursues a response by reformulating the instruction. The tactile prompts function as a way of making a specific body part relevant (Nishizaka, 2007), which can be beneficial in regards to his Parkinson’s disease and the related dementia diagnosis. As such, the prompts appear oriented towards activating the resident’s movement of the body part in question and thereby facilitating an apt embodied response; but also towards addressing potential problems of understanding. There are several summonses that seek to establish mutual attention to the activity in progress, and the haptic actions carried out in order to stop the resident’s inappropriate actions (moving forward) also seem oriented towards a problem understanding the instruction rather than unwillingness to carry it out. Thus, in contrast to the studies of children and caretakers (Cekaite, 2011, 2015, 2016), touch in these caregiving activities seems aimed at compensating for physical and cognitive impairments rather than overcoming resistance from the co-participant.
When the first-pair part is not followed by a second-pair part, our analysis suggests that the various semiotic modes of instruction occur in a successive order. The caregiver mostly begins her instructions verbally and by deictic gestures, for instance by pointing to the relevant object or space. If the instructed action is not forthcoming, she then turns to haptic actions, such as touching the body part that needs to move. She thus seems to orient to a preference for using semiotic modes that do not invade the physical intimacy of the resident, and resorts to touch only when this does not succeed in generating a response. This is in line with the observations made by Cekaite (2010, 2015) on the use of touch in requests to children, and may thus reflect a more general preference in interaction.
In these three excerpts, touch ranges from gentle pats on the back of the resident’s hand to grabbing him by both his hips and thereby being able to control his bodily movement almost completely. Within the haptic mode there also seems to be a hierarchical order between the various forms of touching. For instance, in Excerpt (1) we saw how the caregiver begins with a gentle pat on the back of the resident’s hand. Then, she leaves her hand on his hand. Next, the caregiver grabs the resident’s hand and finally she more or less controls his right hand and tries to move it to the relevant object. In this way, our analysis also gives rise to the hypothesis that there is a preference for non-invasive and non-dominant touches.
The preference for non-invasive forms of instruction identified here seems oriented to respecting the personal space (privacy) and the right to self-determination of the recipient. As such, it may reflect (and co-constitute) a normative and moral orientation to face (Goffman, 1967; Lerner, 1996). However, the analysis has also considered what may be considered deviant cases, in which touch is used not as a prompt but in the first attempt, and in which dominant and invasive haptic actions occur immediately, without less invasive touches having been tried first. We argue that these instances may be explained as resulting from a conflict between the preferences for non-invasive forms of instruction and the preference for progressivity. The concern for progressivity seems to override concerns of face in cases where the resident is deemed not capable of carrying out the action in question (as in Excerpt 3) or performs an action that is deemed faulty or inappropriate given the goal of the joint project.
References
Antaki, C. (2011). Applied conversation analysis: Intervention and change in institutional talk. New York: Palgrave Macmillan.
Budson, A. E., & Kowall, N. W. (2011). The handbook of Alzheimer's disease and other dementias (2. Aufl.;1; ed.). Malden, MA;Chichester, West Sussex, UK;: Wiley-Blackwell.
Cekaite, A. (2016). Touch as social control: Haptic organization of attention in adult–child interactions. Journal of Pragmatics, 92, 30-42.
Denman, A., & Wilkinson, R. (2011). Applying conversation analysis to traumatic brain injury: Investigating touching another person in everyday social interaction. Disability and Rehabilitation, 33(3), 243-252.
Goffman, E. (1967). On face-work. In: E. Goffman (Ed.), Interaction ritual: Essays on face-to-face interaction (pp. 5-46). New York: Pantheon Books.
Goodwin, C. (1980). Restarts, pauses, and the achievement of a state of mutual gaze at turn-beginning. Sociological Inquiry, 50(3-4), 272-302.
Goodwin, C. (2003). Pointing as situated practice. In: S. Kita (Ed..), Pointing: Where language, culture, and cognition meet (pp. 217–241). Mahwah, New Jersey: Lawrence Erlbaum.
Goodwin, C. (2010). Things and their embodied environments. Cambridge, UK: McDonald Institute for Archaeological Research.
Goodwin, C. (2013). The co-operative, transformative organization of human action and knowledge. Journal of Pragmatics, 46(1), 8-23.
Goodwin, M. H. (2015). A care-full look at language, gender, and embodied intimacy. In: A. Jule (Ed.), Shifting visions: Gender, sexuality, discourse, and language (pp. 27-48). Newcastle upon Tyne: Cambridge Scholars Publishing.
Goodwin, M. H., & Cekaite, A. (2013). Calibration in directive/response sequences in family interaction. Journal of Pragmatics: An Interdisciplinary Journal of Language Studies, 46(1), 122-138.
Griffiths, S., Barnes, R., Britten, N., & Wilkinson, R. (2011). Investigating interactional competencies in Parkinson's disease: the potential benefits of a conversation analytic approach. International Journal of Language & Communication Disorders / Royal College of Speech & Language Therapists, 46(5), 497-509.
Heath, C. (1986). Body movement and speech in medical interaction. Cambridge: Cambridge University Press.
Heinemann, T. (2009). Managing unavoidable conflicts in caretaking of the elderly: Humor as a mitigating resource. International Journal of the Sociology of Language, 200, 103-127.
Heinemann, T., & Lindstöm, A. (2007). Particles, pursuits, and preference organization. Paper presented at the International Pragmatics Association Conference Göteborg.
Jansson, G. (2016). ‘You’re doing everything just fine’: Praise in residential care settings. Discourse Studies, 18(1), 64-86.
Jansson, G., & Plejert, C. (2014). Taking a shower: Managing a potentially imposing activity in dementia care. Journal of Interactional Research in Communication Disorders, 5(1), 27-62.
Jefferson, G. (2004). Glossary of transcript symbols with an introduction In: G.H. Lerner (Ed.), Conversation analysis: Studies from the first generation (pp. 13-31). Amsterdam/Philadelphia: John Benjamins.
Keevallik, L. (2010). Bodily quoting in dance correction. Research on Language & Social Interaction, 43(4), 401-426.
Kelly, F. (2014). Bodywork in dementia care: recognising the commonalities of selfhood to facilitate respectful care in institutional settings. Ageing & Society, 34(6), 1073-1090.
Kindell, J., Keady, J., Sage, K., & Wilkinson, R. (2017). Everyday conversation in dementia: A review of the literature to inform research and practice: Conversation in dementia. International Journal of Language & Communication Disorders, 52(4), 392-406.
Lerner, G. H. (1996). Finding ''face'' in the preference structures of talk-in-interaction. Social Psychology Quarterly, 59(4), 303-321.
Mondada, L. (2016). Challenges of multimodality: Language and the body in social interaction. Journal of Sociolinguistics, 20(3), 336-366.
Nishizaka, A. (2007). Hand touching hand: Referential practice at a Japanese midwife house. Human Studies, 30(3), 199-217.
Nishizaka, A. (2011). Touch without vision: Referential practice in a non-technological environment. Journal of Pragmatics, 43(2), 504-520.
Pomerantz, A. (1984). Pursuing a response. In J. M. Atkinson & J. Heritage (Eds.), Structures of social action. Studies in conversation analysis (pp. 152-163). Cambridge: Cambridge University Press.
Rossi, G. (2012). Bilateral and unilateral requests: The use of imperatives and mi x? Interrogatives in Italian. Discourse Processes, 49(5), 426-458.
Schegloff, E. A. (1996). Turn organization: One intersection of grammar and interaction. In: E. Ochs, E. ASchegloff, & S. Thompson (Eds.), Interaction and grammar (Vol. 2, pp. 52-133). Cambridge: Cambridge University Press.
Schegloff, E. A., & Sacks, H. (1973). Opening up closings. Semiotica, 8(4), 289-327.
Stivers, T., & Robinson, J. D. (2006). A preference for progressivity in interaction. Language in Society, 35(3), 367-392.
Wilkinson, R. (2013). Conversation analysis and communication disorders. In: C. A. Chapelle (Ed.), The encyclopedia of applied linguistics (pp. 962-967). Malden, MA: Wiley-Blackwell.
Zinken, J., & Ogiermann, E. (2013). Responsibility and action: Invariants and diversity
in requests for objects in British English and Polish interaction. Research on Language and Social Interaction, 46(3), 256-276.